boustrophedonOptions
Description
The boustrophedonOptions object defines the behavior of polygon
decomposition using the boustrophedon algorithm and enables you to generate a connectivity
graph of polygon cells post-decomposition. Specify this object to the polygonDecomposition
function to perform decomposition using the boustrophedon decomposition algorithm with the
specified options [1].
Creation
Description
options = boustrophedonOptions generates a polygon decomposition
options object with default properties. Specify this object to the polygonDecomposition function to perform decomposition using the
boustrophedon decomposition algorithm with the specified options.
options = boustrophedonOptions(
sets one or more properties for PropertyName=Value)options using name-value
arguments.
Properties
Examples
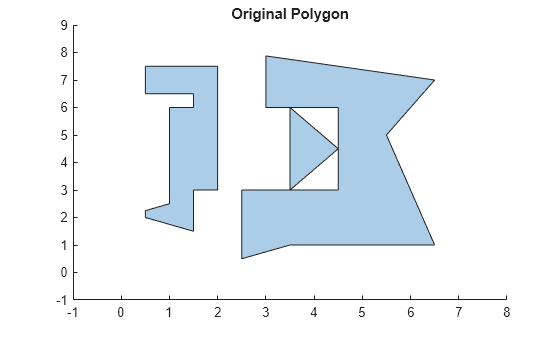
Load a polyshape and plot it.
load("exampleComplexPolyshape.mat","p") plot(p) title("Original Polygon")
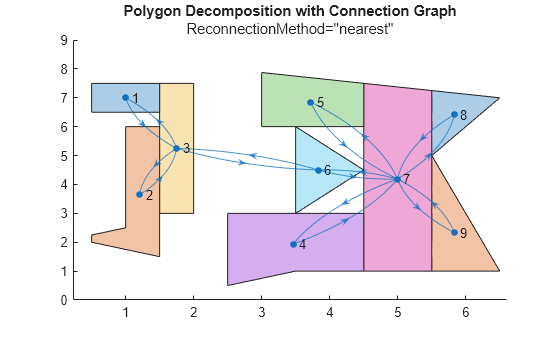
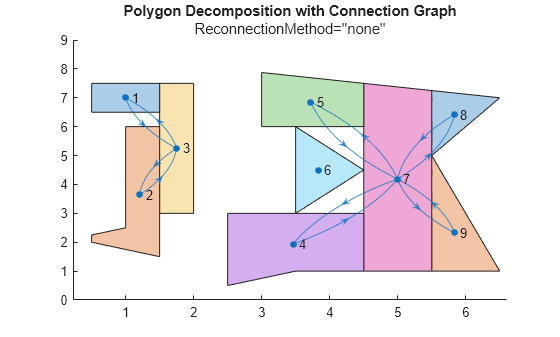
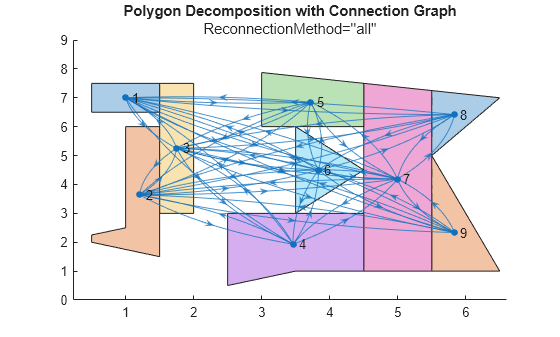
Decompose the polygon using each reconnection method.
bOpts1 = boustrophedonOptions(ReconnectionMethod="nearest"); [polySet1,info1] = polygonDecomposition(p,bOpts1); bOpts2 = boustrophedonOptions(ReconnectionMethod="none"); [polySet2,info2] = polygonDecomposition(p,bOpts2); bOpts3 = boustrophedonOptions(ReconnectionMethod="all"); [polySet3,info3] = polygonDecomposition(p,bOpts3);
Show the polygon decomposition with a connectivity graph overlay for each reconnection method.
plot(polySet1) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet1,info1.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''nearest''") hold off
plot(polySet2) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet2,info2.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''none''"); hold off
plot(polySet3) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet3,info3.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''all''"); hold off
This is the helper function for plotting the polygon decomposition and overlaying the connectivity graph.
function gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,connectionGraph,lineWidth) % Get the current axes ax = gca; ax.ColorOrderIndex = 1; % Reset the color order index % Overlay the connectivity graph gHandle = show(connectionGraph); gHandle.EdgeAlpha = 0.75; gHandle.LineWidth = lineWidth; % Set the line width for the graph edges % Calculate and plot the centroids [cx,cy] = centroid(polySet); % Set the xy-positions of the connectivity graph to the centroids of % the polygons gHandle.XData = cx'; gHandle.YData = cy'; end
Load a rectangular polygon with multiple holes as a polyshape object.
load("exampleRectangleWithHolesPolyshape.mat","p")
Define a connected cost function that uses terrain data and assigns costs to edges based on the magnitude of the slope change.
function cost = terrainConnectedCostFcn(polySet,i,J,userData) arguments polySet {mustBeA(polySet,{'polyshape','nav.decomp.internal.polyshapeMgr'})} i (1,1) {mustBeInteger,mustBePositive} J (:,1) {mustBeInteger,mustBePositive} userData (1,1) struct end % Extract dx, dy, and the coordinate bounds from userData dx = userData.XSlope; dy = userData.YSlope; xBounds = userData.XBounds; yBounds = userData.YBounds; % Calculate the slope magnitude slope_magnitude = sqrt(dx.^2 + dy.^2); % Define the coordinates for the slope map based on the provided bounds x = linspace(xBounds(1),xBounds(2),size(slope_magnitude,1)); y = linspace(yBounds(1),yBounds(2),size(slope_magnitude,2)); % Initialize the cost array cost = zeros(size(J)); % Calculate the average slope for the starting polyshape avgSlope_i = calculateAverageSlope(polySet(i),slope_magnitude,x,y); for idx = 1:numel(J) % Calculate the average slope for each target polyshape avgSlope_j = calculateAverageSlope(polySet(J(idx)),slope_magnitude,x,y); % Define a cost function that includes the average slope difference % For example, prioritize smaller slope differences cost(idx) = abs(avgSlope_i-avgSlope_j); end end function avgSlope = calculateAverageSlope(poly,slope_magnitude,x,y) % Find the bounding box of the polyshape [x_lim,y_lim] = boundingbox(poly); % Determine the indices in the slope map that correspond to this % polyshape x_indices = find(x >= x_lim(1) & x <= x_lim(2)); y_indices = find(y >= y_lim(1) & y <= y_lim(2)); % Extract the relevant portion of the slope map slopesInPoly = slope_magnitude(y_indices,x_indices); % Compute the average slope for the polyshape avgSlope = mean(slopesInPoly(:)); end
Define custom data for the cost functions to use. Create an L-membrane to represent terrain, and calculate the slope at each point.
Z = membrane(1,3); [dx,dy] = gradient(Z);
Store the slope and bounds data in a structure.
terrainData.XSlope = dx; terrainData.YSlope = dy; terrainData.XBounds = [1 8]; terrainData.YBounds = [1 8];
Create a boustrophedon options object, and specify the custom connected cost function and terrain data.
bOpts = boustrophedonOptions(ConnectedCostFcn="terrainConnectedCostFcn",UserData=terrainData);Decompose the polygon and plot the set of resulting polygons.
[polySet,info] = polygonDecomposition(p,bOpts); plot(polySet) axis equal hold on
Overlay the connectivity graph, and highlight the edges to show the edge costs between the decomposed polygons. Note that the peak of the L-membrane is around polygons 8, 11, and 13, so edges connecting these polygons to polygons in the top-left have a higher edge cost.
gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,info.Connectivity,2);
exampleHelperVisualizeConnectionGraphWeights(info.Connectivity,gHandle);
title("Connection Graph with Cost Visualized")
customLinkInfo = info.Connectivity.LinkscustomLinkInfo=44×2 table
EndStates Weight
_________ ________
1 2 0.090406
1 3 0.026001
1 4 0.27418
2 1 0.090406
2 5 0
3 1 0.026001
3 5 0.11641
3 6 0.29335
4 1 0.27418
4 6 0.04517
5 2 0
5 3 0.11641
5 7 0.062287
5 8 0.4142
6 3 0.29335
6 4 0.04517
⋮
hold off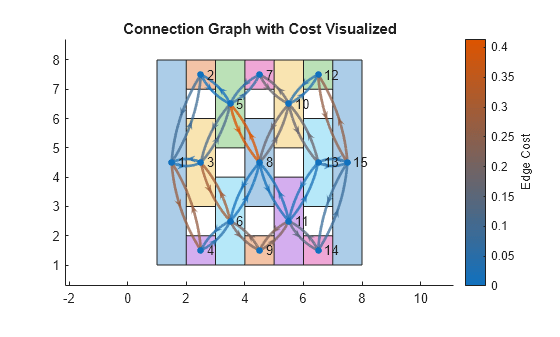
Load a complex polyshape.
load exampleComplexPolyshape.matDefine a custom disconnected cost function that prioritizes reconnecting the disconnected polygons using the longest edge possible.
function cost = longEdgeDisconnectedCostFcn(polySet,i,J,userData) arguments polySet {mustBeA(polySet,{'polyshape','nav.decomp.internal.polyshapeMgr'})} i (1,1) {mustBeInteger,mustBePositive} J (:,1) {mustBeInteger,mustBePositive} userData (1,1) struct %#ok<INUSA> end c1 = [0 0]; c2 = zeros(numel(J),2); % Calculate the centroid of the current polygon [c1(1),c1(2)] = polySet(i).centroid; % Get the centroids of possible polygons connections for i = 1:numel(J) [c2(i,1),c2(i,2)] = polySet(J(i)).centroid; end % Calculate the centroid distances between the current polygon and % other polygons distances = vecnorm(c2-c1,2,2); % Calculate the inverse distance cost. Add a small number to avoid % division by zero cost = 1./(distances + 1e-6); end
Create a boustrophedon polygon decomposition options object, and specify the disconnected cost function.
bOpts = boustrophedonOptions(DisconnectedCostFcn="longEdgeDisconnectedCostFcn", ... ReconnectionMethod="nearest");
Decompose the polygon and visualize the graph connection.
[polySet,info] = polygonDecomposition(p,bOpts);
plot(polySet)
hold on
gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,info.Connectivity,0.5);
info.Connectivity.Linksans=16×2 table
EndStates Weight
_________ _______
1 3 0
1 6 0.26465
1 9 0.14884
2 3 0
3 1 0
3 2 0
4 7 0
5 7 0
6 1 0.26465
7 4 0
7 5 0
7 8 0
7 9 0
8 7 0
9 1 0.14884
9 7 0
c = colororder;
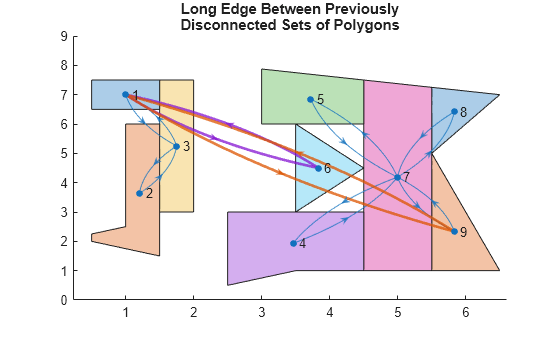
Highlight the edges between the previously disconnected sets of polygons. Note that polygon 6 is also disconnected, because it does not share any edges even though its vertices are in contact with other edges.
highlight(gHandle,Edges=[3 15],EdgeColor=c(2,:),LineWidth=2) % Edge from Polygon 1 to Polygon 9 highlight(gHandle,Edges=[2 9],EdgeColor=c(4,:),LineWidth=2) % Edge from Polygon 1 to Polygon 6 title(["Long Edge Between Previously","Disconnected Sets of Polygons"]) hold off
References
[1] Choset, Howie. "Coverage of Known Spaces: The Boustrophedon Cellular Decomposition." Autonomous Robots 9 no. 3, (2000): 247–53. https://doi.org/10.1023/A:1008958800904.
Extended Capabilities
Version History
Introduced in R2025a