coneprog
Second-order cone programming solver
Syntax
Description
The coneprog function is a second-order cone programming
solver that finds the minimum of a problem specified by
subject to the constraints
f, x, b, beq,
lb, and ub are vectors, and A and
Aeq are matrices. For each i, the matrix
Asoc(i), vectors
dsoc(i) and
bsoc(i), and scalar
γ(i) are in a second-order cone constraint that you
create using secondordercone.
For more details about cone constraints, see Second-Order Cone Constraint.
x = coneprog(f,socConstraints)socConstraints encoded as
Asoc(i) =
socConstraints(i).Absoc(i) =
socConstraints(i).bdsoc(i) =
socConstraints(i).dγ(i) =
socConstraints(i).gamma
Examples
To set up a problem with a second-order cone constraint, create a second-order cone constraint object.
Asoc = diag([1,1/2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = 0; socConstraints = secondordercone(Asoc,bsoc,dsoc,gamma);
Create an objective function vector.
f = [-1,-2,0];
The problem has no linear constraints. Create empty matrices for these constraints.
Aineq = []; bineq = []; Aeq = []; beq = [];
Set upper and lower bounds on x(3).
lb = [-Inf,-Inf,0]; ub = [Inf,Inf,2];
Solve the problem by using the coneprog function.
[x,fval] = coneprog(f,socConstraints,Aineq,bineq,Aeq,beq,lb,ub)
Optimal solution found.
x = 3×1
0.4851
3.8806
2.0000
fval = -8.2462
The solution component x(3) is at its upper bound. The cone constraint is active at the solution:
norm(Asoc*x-bsoc) - dsoc'*x % Near 0 when the constraint is activeans = -2.5677e-08
To set up a problem with several second-order cone constraints, create an array of constraint objects. To save time and memory, create the highest-index constraint first.
Asoc = diag([1,2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = -1; socConstraints(3) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([3,0,1]); dsoc = [0;1;0]; socConstraints(2) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([0;1/2;1/2]); dsoc = [1;0;0]; socConstraints(1) = secondordercone(Asoc,bsoc,dsoc,gamma);
Create the linear objective function vector.
f = [-1;-2;-4];
Solve the problem by using the coneprog function.
[x,fval] = coneprog(f,socConstraints)
Optimal solution found.
x = 3×1
0.4238
1.6477
2.3225
fval = -13.0089
Specify an objective function vector and a single second-order cone constraint.
f = [-4;-9;-2]; Asoc = diag([1,4,0]); bsoc = [0;0;0]; dsoc = [0;0;1]; gamma = 0; socConstraints = secondordercone(Asoc,bsoc,dsoc,gamma);
Specify a linear inequality constraint.
A = [1/4,1/9,1]; bsoc = 5;
Solve the problem.
[x,fval] = coneprog(f,socConstraints,A,bsoc)
Optimal solution found.
x = 3×1
3.2305
0.6398
4.1213
fval = -26.9225
To observe the iterations of the coneprog solver, set the Display option to "iter".
options = optimoptions("coneprog",Display="iter");
Create a second-order cone programming problem and solve it using options.
Asoc = diag([1,1/2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = 0; socConstraints = secondordercone(Asoc,bsoc,dsoc,gamma); f = [-1,-2,0]; Aineq = []; bineq = []; Aeq = []; beq = []; lb = [-Inf,-Inf,0]; ub = [Inf,Inf,2]; [x,fval] = coneprog(f,socConstraints,Aineq,bineq,Aeq,beq,lb,ub,options)
Iter Fval Primal Infeas Dual Infeas Duality Gap Time 0 0.000000e+00 0.000000e+00 5.714286e-01 2.000000e-01 0.01 1 -7.558066e+00 0.000000e+00 7.151114e-02 2.502890e-02 0.01 2 -7.366973e+00 0.000000e+00 1.075440e-02 3.764040e-03 0.01 3 -8.243432e+00 0.000000e+00 5.191882e-05 1.817159e-05 0.01 4 -8.246067e+00 0.000000e+00 2.430813e-06 8.507845e-07 0.01 5 -8.246211e+00 1.387779e-17 6.154504e-09 2.154077e-09 0.01 Optimal solution found.
x = 3×1
0.4851
3.8806
2.0000
fval = -8.2462
Create the elements of a second-order cone programming problem. To save time and memory, create the highest-index constraint first.
Asoc = diag([1,2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = -1; socConstraints(3) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([3,0,1]); dsoc = [0;1;0]; socConstraints(2) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([0;1/2;1/2]); dsoc = [1;0;0]; socConstraints(1) = secondordercone(Asoc,bsoc,dsoc,gamma); f = [-1;-2;-4]; options = optimoptions("coneprog",Display="iter");
Create a problem structure with the required fields, as described in problem.
problem = struct("f",f,... "socConstraints",socConstraints,... "Aineq",[],"bineq",[],... "Aeq",[],"beq",[],... "lb",[],"ub",[],... "solver","coneprog",... "options",options);
Solve the problem by calling coneprog.
[x,fval] = coneprog(problem)
Iter Fval Primal Infeas Dual Infeas Duality Gap Time 0 0.000000e+00 0.000000e+00 5.333333e-01 9.090909e-02 0.04 1 -9.696012e+00 5.551115e-17 7.631901e-02 1.300892e-02 0.05 2 -1.178942e+01 0.000000e+00 1.261803e-02 2.150800e-03 0.05 3 -1.294426e+01 4.625929e-18 1.683078e-03 2.868883e-04 0.05 4 -1.295217e+01 1.850372e-17 8.994595e-04 1.533170e-04 0.05 5 -1.295331e+01 0.000000e+00 4.748841e-04 8.094615e-05 0.05 6 -1.300753e+01 9.251859e-18 2.799942e-05 4.772628e-06 0.05 7 -1.300671e+01 9.251859e-18 2.366136e-05 4.033187e-06 0.05 8 -1.300850e+01 1.850372e-17 8.259278e-06 1.407831e-06 0.05 9 -1.300842e+01 3.700743e-17 7.366918e-06 1.255725e-06 0.05 10 -1.300864e+01 1.850372e-17 2.647853e-06 4.513386e-07 0.05 11 -1.300892e+01 1.850372e-17 4.467886e-08 7.615715e-09 0.05 Optimal solution found.
x = 3×1
0.4238
1.6477
2.3225
fval = -13.0089
Create a second-order cone programming problem. To save time and memory, create the highest-index constraint first.
Asoc = diag([1,2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = -1; socConstraints(3) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([3,0,1]); dsoc = [0;1;0]; socConstraints(2) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([0;1/2;1/2]); dsoc = [1;0;0]; socConstraints(1) = secondordercone(Asoc,bsoc,dsoc,gamma); f = [-1;-2;-4]; options = optimoptions("coneprog",Display="iter"); Aineq = []; bineq = []; Aeq = []; beq = []; lb = []; ub = [];
Solve the problem, requesting information about the solution process.
[x,fval,exitflag,output] = coneprog(f,socConstraints,Aineq,bineq,Aeq,beq,lb,ub,options)
Iter Fval Primal Infeas Dual Infeas Duality Gap Time 0 0.000000e+00 0.000000e+00 5.333333e-01 9.090909e-02 0.06 1 -9.696012e+00 1.850372e-17 7.631901e-02 1.300892e-02 0.09 2 -1.178942e+01 1.850372e-17 1.261803e-02 2.150800e-03 0.09 3 -1.294426e+01 9.251859e-18 1.683078e-03 2.868883e-04 0.09 4 -1.295217e+01 9.251859e-18 8.994595e-04 1.533170e-04 0.10 5 -1.295331e+01 1.850372e-17 4.748841e-04 8.094615e-05 0.10 6 -1.300753e+01 1.850372e-17 2.799942e-05 4.772628e-06 0.10 7 -1.300671e+01 3.700743e-17 2.366136e-05 4.033187e-06 0.10 8 -1.300850e+01 9.251859e-18 8.232024e-06 1.403186e-06 0.10 9 -1.300843e+01 4.625929e-18 7.388668e-06 1.259432e-06 0.11 10 -1.300861e+01 9.251859e-18 2.727129e-06 4.648516e-07 0.11 11 -1.300891e+01 0.000000e+00 1.544274e-07 2.632285e-08 0.11 Optimal solution found.
x = 3×1
0.4238
1.6477
2.3225
fval = -13.0089
exitflag = 1
output = struct with fields:
iterations: 11
primalfeasibility: 0
dualfeasibility: 1.5443e-07
dualitygap: 2.6323e-08
algorithm: 'interior-point'
linearsolver: 'augmented'
message: 'Optimal solution found.'
Both the iterative display and the output structure show that
coneprogtakes 11 iterations to arrive at the solution.The exit flag value
1and theoutput.messagevalue'Optimal solution found.'indicate that the solution is reliable.The
outputstructure shows that the infeasibilities tend to decrease through the solution process, as does the duality gap.You can reproduce the
fvaloutput by multiplyingf'*x.
f'*x
ans = -13.0089
Create a second-order cone programming problem. To save time and memory, create the highest-index constraint first.
Asoc = diag([1,2,0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma = -1; socConstraints(3) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([3,0,1]); dsoc = [0;1;0]; socConstraints(2) = secondordercone(Asoc,bsoc,dsoc,gamma); Asoc = diag([0;1/2;1/2]); dsoc = [1;0;0]; socConstraints(1) = secondordercone(Asoc,bsoc,dsoc,gamma); f = [-1;-2;-4];
Solve the problem, requesting dual variables at the solution along with all other coneprog output..
[x,fval,exitflag,output,lambda] = coneprog(f,socConstraints);
Optimal solution found.
Examine the returned lambda structure. Because the only problem constraints are cone constraints, examine only the soc field in the lambda structure.
disp(lambda.soc)
5.9356
4.6079
2.4654
The constraints have nonzero dual values, indicating the constraints are active at the solution.
Input Arguments
Coefficient vector, specified as a real vector or real array. The coefficient vector
represents the objective function f'*x. The notation assumes that
f is a column vector, but you can use a row vector or array.
Internally, coneprog converts f to the column
vector f(:).
Example: f = [1,3,5,-6]
Data Types: double
Second-order cone constraints, specified as vector or cell array of SecondOrderConeConstraint objects. Create these objects using the secondordercone function.
socConstraints encodes the constraints
where the mapping between the array and the equation is as follows:
Asoc(i) =
socConstraints.A(i)bsoc(i) =
socConstraints.b(i)dsoc(i) =
socConstraints.d(i)γ(i) =
socConstraints.gamma(i)
Example: Asoc = diag([1 1/2 0]); bsoc = zeros(3,1); dsoc = [0;0;1]; gamma =
-1; socConstraints = secondordercone(Asoc,bsoc,dsoc,gamma);
Linear inequality constraints, specified as a real matrix. A is an M-by-N matrix, where M is the number of inequalities, and N is the number of variables (length of f). For large problems, pass A as a sparse matrix.
A encodes the M linear inequalities
A*x <= b,
where x is the column vector of N variables x(:), and b is a column vector with M elements.
For example, consider these inequalities:
x1 +
2x2 ≤
10
3x1 +
4x2 ≤
20
5x1 +
6x2 ≤ 30.
Specify the inequalities by entering the following constraints.
A = [1,2;3,4;5,6]; b = [10;20;30];
Example: To specify that the x-components add up to 1 or less, take A =
ones(1,N) and b = 1.
Data Types: double
Linear inequality constraints, specified as a real vector. b is an
M-element vector related to the A matrix. If
you pass b as a row vector, solvers internally convert
b to the column vector b(:).
b encodes the M linear
inequalities
A*x <= b,
where x is the column vector of N variables x(:),
and A is a matrix of size M-by-N.
For example, consider these inequalities:
x1
+ 2x2 ≤
10
3x1
+ 4x2 ≤
20
5x1
+ 6x2 ≤
30.
Specify the inequalities by entering the following constraints.
A = [1,2;3,4;5,6]; b = [10;20;30];
Example: To specify that the x components sum to 1 or less, use A =
ones(1,N) and b = 1.
Data Types: single | double
Linear equality constraints, specified as a real matrix. Aeq is an Me-by-N matrix, where Me is the number of equalities, and N is the number of variables (length of f). For large problems, pass Aeq as a sparse matrix.
Aeq encodes the Me linear equalities
Aeq*x = beq,
where x is the column vector of N variables x(:), and beq is a column vector with Me elements.
For example, consider these equalities:
x1 +
2x2 +
3x3 =
10
2x1 +
4x2 +
x3 = 20.
Specify the equalities by entering the following constraints.
Aeq = [1,2,3;2,4,1]; beq = [10;20];
Example: To specify that the x-components sum to 1, take Aeq = ones(1,N) and
beq = 1.
Data Types: double
Linear equality constraints, specified as a real vector. beq is an
Me-element vector related to the Aeq matrix.
If you pass beq as a row vector, solvers internally convert it to the
column vector beq(:).
beq encodes the Me linear
equalities
Aeq*x = beq,
where x is the column vector of N variables
x(:), and Aeq is a matrix of size
Me-by-N.
For example, consider these equalities:
x1
+ 2x2 +
3x3 =
10
2x1
+ 4x2 +
x3 =
20.
Specify the equalities by entering the following constraints.
Aeq = [1,2,3;2,4,1]; beq = [10;20];
Example: To specify that the x components sum to 1, use Aeq = ones(1,N) and
beq = 1.
Data Types: single | double
Lower bounds, specified as a real vector or real array. If the length of
f is equal to the length of lb, then
lb specifies that
x(i) >= lb(i) for all i.
If numel(lb) < numel(f), then lb specifies that
x(i) >= lb(i) for 1 <= i <= numel(lb).
In this case, solvers issue a warning.
Example: To specify that all x-components are positive, use lb =
zeros(size(f)).
Data Types: double
Upper bounds, specified as a real vector or real array. If the length of
f is equal to the length of ub, then
ub specifies that
x(i) <= ub(i) for all i.
If numel(ub) < numel(f), then ub specifies that
x(i) <= ub(i) for 1 <= i <= numel(ub).
In this case, solvers issue a warning.
Example: To specify that all x-components are less than 1, use ub =
ones(size(f)).
Data Types: double
Optimization options, specified as the output of
optimoptions.
| MATLAB Options | |
|---|---|
| Option | Description |
ConstraintTolerance | Feasibility tolerance for constraints, a nonnegative scalar.
|
| Level of display (see Iterative Display):
|
LinearSolver | Algorithm for solving one step in the iteration:
If
For a sparse example, see Compare Speeds of coneprog Algorithms. |
| Maximum number of iterations allowed, a nonnegative integer. The
default is See Tolerances and Stopping Criteria and Iterations and Function Counts. |
MaxTime | Maximum amount of time in seconds that the algorithm runs, a
nonnegative number or |
| Termination tolerance on the relative duality gap, a nonnegative
scalar. For a definition, see Equation 5. The default
is |
| Code Generation | |
ConstraintTolerance | Feasibility tolerance for constraints, a nonnegative scalar.
|
| Level of display (see Iterative Display):
Iterative display does not show a column for time in generated code. |
LinearSolver | Algorithm for solving one step in the iteration: For code generation, there is a limited set of choices of
|
| Maximum number of iterations allowed, a nonnegative integer. The
default is See Tolerances and Stopping Criteria and Iterations and Function Counts. |
| Termination tolerance on the dual feasibility, a nonnegative scalar.
The default is |
Code generation does not support the MaxTime option.
Example: optimoptions("coneprog",Display="iter",MaxIterations=100)
Problem structure, specified as a structure with the following fields.
| Field Name | Entry |
|---|---|
| Linear objective function vector f |
| Structure array of second-order cone constraints, or cell array of
cons = {soc1 soc2 soc3};
problem.socConstraints = {cons}; |
| Matrix of linear inequality constraints |
| Vector of linear inequality constraints |
| Matrix of linear equality constraints |
| Vector of linear equality constraints |
lb | Vector of lower bounds |
ub | Vector of upper bounds |
| 'coneprog' |
| Options created with optimoptions |
Caution
The problem argument must be a scalar structure. If you create
cone constraints as a cell array, the resulting problem structure can be a nonscalar
structure array. To ensure that problem is scalar, pass
{{soc1 soc2 ... socn}} or pass a vector of cone
constraints.
Data Types: struct
Output Arguments
Objective function value at the solution, returned as a real number. Generally,
fval = f'*x. The fval output
is empty (NaN for code generation) when the
exitflag value is –2, –3,
or –10.
Reason coneprog stopped, returned as an integer.
| Value | Description |
|---|---|
| The function converged to a solution
|
| The number of iterations exceeded
|
| No feasible point was found. |
| The problem is unbounded. |
| The search direction became too small. No further progress could be made. |
| Undefined step, the algorithm cannot continue due to a singular system. Code generation only with sparse data. Switching to full data instead of sparse can help the solver to complete successfully. |
| The problem is numerically unstable. |
Tip
If you get exit flag 0, -7, or
-10, try using a different value of the
LinearSolver option.
Information about the optimization process, returned as a structure with these fields.
| Field | Description |
|---|---|
algorithm |
|
dualfeasibility | Maximum of dual constraint violations |
dualitygap | Duality gap |
iterations | Number of iterations |
message | Exit message — not available in code generation |
primalfeasibility | Maximum of constraint violations |
linearsolver | Internal step solver algorithm used |
The output fields algorithm,
dualfeasibility, dualitygap,
linearsolver, and primalfeasibility are empty
(numeric values are NaN for code generation) when the
exitflag value is –2, –3, or –10.
The iterations field has int32 type for code
generation, not double.
Dual variables at the solution, returned as a structure with these fields.
| Field | Description |
|---|---|
lower | Lower bounds corresponding to |
upper | Upper bounds corresponding to |
ineqlin | |
eqlin | |
soc | Second-order cone constraints corresponding to
socConstraints |
lambda is empty ([]) when the
exitflag value is –2, –3,
or –10.
The Lagrange multipliers (dual variables) are part of the following Lagrangian, which is stationary (zero gradient) at a solution:
More About
Why is the constraint
called a second-order cone constraint? Consider a cone in 3-D space with elliptical cross-sections in the x-y plane, and a diameter proportional to the z coordinate. The y coordinate has scale ½, and the x coordinate has scale 1. The inequality defining the inside of this cone with its point at [0,0,0] is
In the coneprog syntax, this cone has the following
arguments.
A = diag([1 1/2 0]); b = [0;0;0]; d = [0;0;1]; gamma = 0;
Plot the boundary of the cone.
[X,Y] = meshgrid(-2:0.1:2); Z = sqrt(X.^2 + Y.^2/4); surf(X,Y,Z) view(8,2) xlabel 'x' ylabel 'y' zlabel 'z'
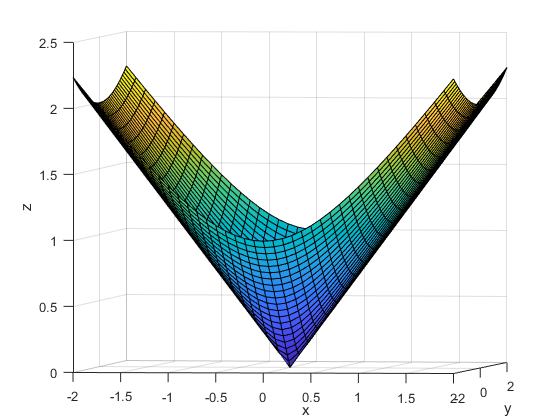
The b and gamma arguments move the cone. The
A and d arguments rotate the cone and change its
shape.
Algorithms
The algorithm uses an interior-point method. For details, see Second-Order Cone Programming Algorithm.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for coneprog.
Extended Capabilities
Usage notes and limitations:
coneprogsupports code generation using either thecodegen(MATLAB Coder) function or the MATLAB® Coder™ app. You must have a MATLAB Coder license to generate code.The target hardware must support standard double-precision floating-point computations.
Code generation targets do not use the same math kernel libraries as MATLAB solvers. Therefore, code generation solutions can vary from solver solutions, especially for poorly conditioned problems.
coneprogdoes not support theproblemargument for code generation.[x,fval] = coneprog(problem) % Not supportedAll
coneproginput matrices such asA,Aeq,secondorderconeinputs,lb, andubcan be full or sparse. To use sparse inputs, you must enable dynamic memory allocation. See Code Generation Limitations (MATLAB Coder). Solvers have good performance with sparse inputs when the fraction of nonzero entries is small.Pass cone constraints as a cell array of
SecondOrderConeConstraintobjects, not as an array of these objects. If you have no cone constraints, pass an empty cell{}.The
lbandubarguments must have the same number of entries as the number of problem variables, or must be empty[].If your target hardware does not support infinite bounds, use
optim.coder.infbound.For advanced code optimization involving embedded processors, you also need an Embedded Coder® license.
Code generation supports these options for
optimoptions:ConstraintToleranceDisplayLinearSolverMaxIterationsOptimalityTolerance
Generated code has limited error checking for options. The recommended way to update an option is to use dot notation, not
optimoptions.opts = optimoptions("coneprog",ConstraintTolerance=1e-4); opts = optimoptions(opts,MaxIterations=1e4); % Not preferred opts.MaxIterations = 1e4; % Recommended
coneprogsupports options passed to the solver, not only options created in the code.If you specify an option that is not supported, the option is typically ignored during code generation. For reliable results, specify only supported options.
Version History
Introduced in R2020bAll input matrices for
coneprogcode generation such asA,Aeq,lb,ub, and the inputs tosecondorderconecan be full or sparse.The new
exitflag-8applies only to code generation with sparse data.You can now update options using
optimoptions, though the recommended way is to use dot notation.opts = optimoptions("coneprog",ConstraintTolerance=1e-4); opts = optimoptions(opts,MaxIterations=1e4); % Not preferred opts.MaxIterations = 1e4; % Recommended
For details, see Code Generation for coneprog Background.
coneprog can generate C/C++ code. For details, see Code Generation for coneprog Background and Generate Code for coneprog. To accommodate code
generation, you can now pass second-order cone constraints as a cell array of SecondOrderConeConstraint objects, which is the required syntax for code
generation. For more information, see Class Limitations for Code Generation (MATLAB Coder).
To gain speed in problems with dense data, set the LinearSolver
option to 'normal-dense'. For an example, see Compare Speeds of coneprog Algorithms.
The coneprog
lambda output
argument fields lambda.eq and lambda.ineq have been
renamed to lambda.eqlin and lambda.ineqlin,
respectively. This change causes the coneprog
lambda structure fields to have the same names as the corresponding
fields in other solvers.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleziona un sito web
Seleziona un sito web per visualizzare contenuto tradotto dove disponibile e vedere eventi e offerte locali. In base alla tua area geografica, ti consigliamo di selezionare: .
Puoi anche selezionare un sito web dal seguente elenco:
Come ottenere le migliori prestazioni del sito
Per ottenere le migliori prestazioni del sito, seleziona il sito cinese (in cinese o in inglese). I siti MathWorks per gli altri paesi non sono ottimizzati per essere visitati dalla tua area geografica.
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)