adaptmesh
Create adaptive 2-D mesh and solve PDE
This page describes the legacy workflow. New features might not be compatible with the
legacy workflow. In the recommended workflow, see generateMesh for mesh generation and solvepde for PDE solution.
Description
[
generates an adaptive u,p,e,t] = adaptmesh(g,b,c,a,f)[p,e,t] mesh and returns the solution
u for an elliptic 2-D PDE problem
for (x,y) ∊ Ω, or the elliptic system PDE problem
with the problem geometry and boundary conditions given by g and
b. The mesh is described by the p,
e, and t matrices.
Upon termination, the function issues one of these messages:
Adaption completed. (This means that theTripickfunction returned zero triangles to refine.)Maximum number of triangles obtained.Maximum number of refinement passes obtained.
Examples
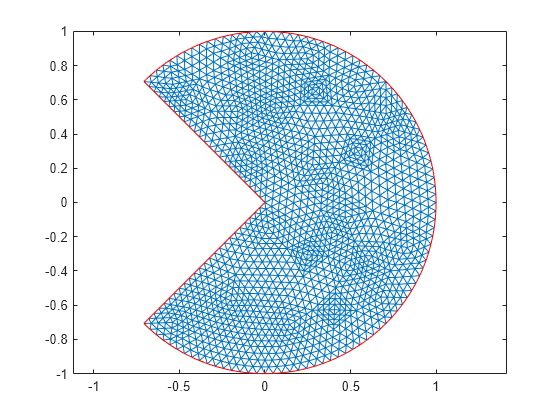
Solve the Laplace equation over a circle sector, with Dirichlet boundary conditions u = cos(2/3atan2(y,x)) along the arc and u = 0 along the straight lines, and compare the resulting solution to the exact solution. Set the options so that adaptmesh refines the triangles using the worst error criterion until it obtains a mesh with at least 500 triangles.
c45 = cos(pi/4); L1 = [2 -c45 0 c45 0 1 0 0 0 0]'; L2 = [2 -c45 0 -c45 0 1 0 0 0 0]'; C1 = [1 -c45 c45 -c45 -c45 1 0 0 0 1]'; C2 = [1 c45 c45 -c45 c45 1 0 0 0 1]'; C3 = [1 c45 -c45 c45 c45 1 0 0 0 1]'; g = [L1 L2 C1 C2 C3]; [u,p,e,t] = adaptmesh(g,"cirsb",1,0,0,"Maxt",500,... "Tripick","pdeadworst");
Number of triangles: 204 Number of triangles: 208 Number of triangles: 217 Number of triangles: 230 Number of triangles: 265 Number of triangles: 274 Number of triangles: 332 Number of triangles: 347 Number of triangles: 460 Number of triangles: 477 Number of triangles: 699 Maximum number of triangles obtained.
Find the maximal absolute error.
x = p(1,:); y = p(2,:); exact = ((x.^2 + y.^2).^(1/3).*cos(2/3*atan2(y,x)))'; max(abs(u - exact))
ans = 0.0028
Find the number of triangles.
size(t,2)
ans = 699
Plot the mesh.
pdemesh(p,e,t)

Test how many refinements you need with a uniform triangle mesh.
[p,e,t] = initmesh(g);
[p,e,t] = refinemesh(g,p,e,t);
u = assempde("cirsb",p,e,t,1,0,0);
x = p(1,:);
y = p(2,:);
exact = ((x.^2 + y.^2).^(1/3).*cos(2/3*atan2(y,x)))';
max(abs(u - exact))ans = 0.0116
Find the number of triangles in this case.
size(t,2)
ans = 816
Refine the mesh one more time. The maximal absolute error for uniform meshing is still greater than for adaptive meshing.
[p,e,t] = refinemesh(g,p,e,t);
u = assempde("cirsb",p,e,t,1,0,0);
x = p(1,:);
y = p(2,:);
exact = ((x.^2 + y.^2).^(1/3).*cos(2/3*atan2(y,x)))';
max(abs(u - exact))ans = 0.0075
Find the number of triangles in this case.
size(t,2)
ans = 3264
Plot the mesh.
pdemesh(p,e,t)
Uniform refinement with more triangles produces a larger error. Typically, a problem with regular solution has an error. However, this solution is singular since at the origin.
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
References
[1] Johnson, C. Numerical Solution of Partial Differential Equations by the Finite Element Method. Lund, Sweden: Studentlitteratur, 1987.
[2] Johnson, C., and K. Eriksson. Adaptive Finite Element Methods for Parabolic Problems I: A Linear Model Problem. SIAM J. Numer. Anal, 28, (1991), pp. 43–77.
[3] Rosenberg, I.G., and F. Stenger. A lower bound on the angles of triangles constructed by bisecting the longest side. Mathematics of Computation. Vol 29, Number 10, 1975, pp 390–395.