derivative
Time derivative of manipulator model states
Syntax
Description
stateDot = derivative(taskMotionModel,state,refPose,refVel)
stateDot = derivative(jointMotionModel,state,cmds)
stateDot = derivative(jointMotionModel,state,cmds,fExt)
Examples
This example shows how to create and use a jointSpaceMotionModel object for a manipulator robot in joint-space.
Create the Robot
robot = loadrobot("kinovaGen3",DataFormat="column",Gravity=[0 0 -9.81]);
Set Up the Simulation
Set the timespan to be 1 s with a time step size of 0.01 s. Set the initial state to be the robot's home configuration with a velocity of zero.
tspan = 0:0.01:1; initialState = [homeConfiguration(robot); zeros(7,1)];
Define the reference state with a target position, zero velocity, and zero acceleration.
targetState = [pi/4; pi/3; pi/2; -pi/3; pi/4; -pi/4; 3*pi/4; zeros(7,1); zeros(7,1)];
Create the Motion Model
Model the system with computed torque control and error dynamics defined by a moderately fast step response with 5% overshoot.
motionModel = jointSpaceMotionModel(RigidBodyTree=robot); updateErrorDynamicsFromStep(motionModel,0.3,0.05);
Simulate the Robot
Use the derivative function of the model as the input to the ode45 solver to simulate the behavior over 1 second.
[t,robotState] = ode45(@(t,state)derivative(motionModel,state,targetState),tspan,initialState);
Plot the Response
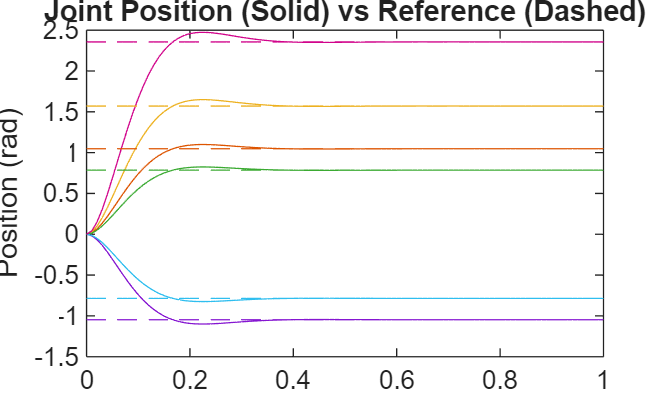
Plot the positions of all the joints actuating to their target state. Joints with a higher displacement between the starting position and the target position actuate to the target at a faster rate than those with a lower displacement. This leads to an overshoot, but all of the joints have the same settling time.
figure plot(t,robotState(:,1:motionModel.NumJoints)); hold on plot(t,targetState(1:motionModel.NumJoints)*ones(1,length(t)),"--"); title("Joint Position (Solid) vs Reference (Dashed)"); xlabel("Time (s)") ylabel("Position (rad)"); hold off
This example shows how to create and use a taskSpaceMotionModel object for a manipulator robot arm in task-space.
Create the Robot
robot = loadrobot("kinovaGen3",DataFormat="column",Gravity=[0 0 -9.81]);
Set Up the Simulation
Set the time span to be 1 second with a timestep size of 0.02 seconds. Set the initial state to the home configuration of the robot, with a velocity of zero.
tspan = 0:0.02:1; initialState = [homeConfiguration(robot);zeros(7,1)];
Define a reference state with a target position and zero velocity.
refPose = se3([0.6 -.1 0.5],"trvec");
refVel = zeros(6,1);Create the Motion Model
Model the behavior as a system under proportional-derivative (PD) control.
motionModel = taskSpaceMotionModel(RigidBodyTree=robot,EndEffectorName="EndEffector_Link");Simulate the Robot
Simulate the behavior over 1 second using a stiff solver to more efficiently capture the robot dynamics. Using ode15s enables higher precision around the areas with a high rate of change.
[t,robotState] = ode15s(@(t,state)derivative(motionModel,state,tform(refPose),refVel),tspan,initialState);
Plot the Response
Plot the initial position of the robot and the target pose.
figure show(robot,initialState(1:7)); axis([-1 1 -1 1 0 1.25]) hold on plotTransforms(refPose,FrameSize=0.2) title("Robot and Target End-Effector Pose")

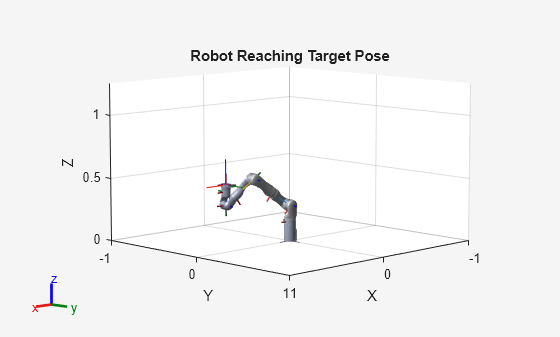
Observe the response by plotting the robot in a 5 Hz loop.
r = rateControl(5); title("Robot Reaching Target Pose") for i = 1:size(robotState,1) show(robot,robotState(i,1:7)',PreservePlot=false); waitfor(r); end hold off
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019b