interp1
Syntax
Description
vq = interp1(x,v,xq)x specifies the sample
points, and v specifies the quaternions that contains the
corresponding values v(x). xq specifies the query
points. By default, the function uses "slerp-short" interpolation
method.
vq = interp1(v,xq)v:
When
vis a vector of quaternions, the default points are1:length(v).When
vis an array of quaternions, the default points are1:size(v,1).
Use this syntax when you are not concerned about the absolute distances between sample points.
vq = interp1(v,xq,method,extrapolation)
Examples
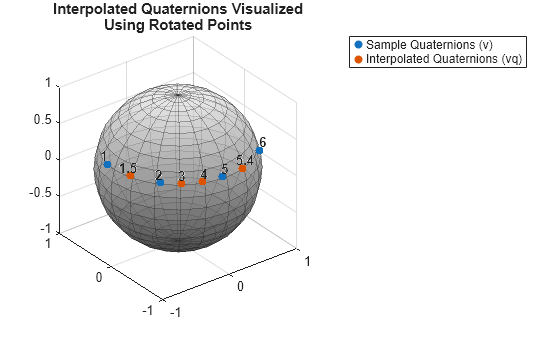
Define the sample points x and corresponding sample values v.
x = [1 2 5 6]; eul = [-185:45:-50; -20*ones(1,4); zeros(1,4)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Define the query points over the range of x.
xq = [1.5 3 4 5.4];
Interpolate at the query points.
vq = interp1(x,v,xq);
To visualize the result, rotate the same point using the sample and interpolated quaternions.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
Plot a unit sphere, and then plot the sample and interpolated quaternions on the sphere.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,x,xq,10,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
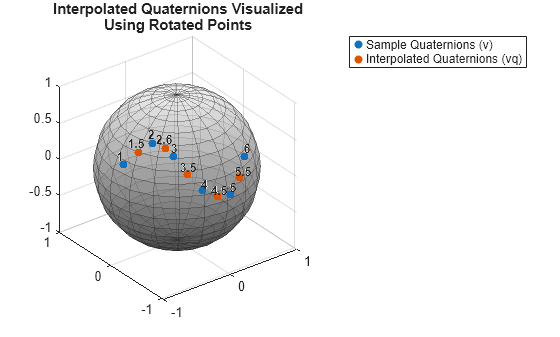
Define a set of function values.
eul = [-170:20:-70; -20*sind(0:72:360)-25; zeros(1,6)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Define a set of query points that fall between the default points, 1:6. In this case, the default points are 1:6 because v is a six-element quaternion array.
xq = [1.5 2.6 3.5 4.5 5.5];
Evaluate v at xq using the SQUAD natural interpolation method. Note that you could use the default "slerp-short" interpolation method here, but for the sine-wave rotation that this quaternion function describes, SQUAD produces a smoother interpolated path.
vq = interp1(v,xq,"squad-natural");To visualize the result, rotate a point on the x-axis using the sample and interpolated quaternions.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
Plot a unit sphere, and then plot the sample and interpolated quaternions on the sphere.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,1:6,xq,9,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
Define three quaternions representing different orientations.
q0 = quaternion([0 0 0],"euler","ZYX","frame"); q1 = quaternion([pi/4 pi/6 pi/3],"euler","ZYX","frame"); q2 = quaternion([pi/2 pi/4 pi/2],"euler","ZYX","frame");
Create a time vector for the original keyframes
x = [1 2 3];
Create a time vector for interpolation
T = linspace(0,3,300);
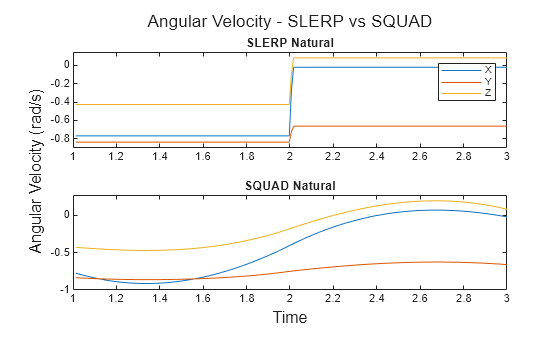
Interpolate using interp1 with the "slerp-natural" and "squad-natural" methods.
quats_slerp = interp1(x,[q0 q1 q2],T,"slerp-natural")'; quats_squad = interp1(x,[q0 q1 q2],T,"squad-natural")';
Calculate the angular velocities for both interpolations methods.
ang_vel_slerp = angvel(quats_slerp,T(2)-T(1),"frame"); ang_vel_squad = angvel(quats_squad,T(2)-T(1),"frame");
Plot the angular velocities.
tl = tiledlayout(2,1);
title(tl,"Angular Velocity - SLERP vs SQUAD")Plot the angular velocities for the SLERP and SQUAD interpolations. Note that the angular velocity from the SQUAD interpolation is smoother than the interpolation using SLERP.
nexttile plot(T,ang_vel_slerp) ylim padded title("SLERP Natural") legend("X","Y","Z") nexttile plot(T,ang_vel_squad) ylim padded title("SQUAD Natural") xlabel(tl,"Time") ylabel(tl,"Angular Velocity (rad/s)")
Define the sample points x and corresponding sample values v.
x = [0 1 2]; eul = [0 30 60; 0 20 60; zeros(1,3)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Specify the query points xq so that they extend beyond the domain of x.
xq = [-0.5 0.5 1.5 2.5];
Now evaluate v at xq using the "slerp-short" interpolation method, and assign any values outside the domain of x to a quaternion with all parts set to 0.
vq = interp1(x,v,xq,"slerp-short",ones("quaternion"))'
vq = 4×1 quaternion array
1 + 0i + 0j + 0k
0.98774 + 0.022751i - 0.084907j - 0.12903k
0.87097 + 0.151i - 0.30755j - 0.35217k
1 + 0i + 0j + 0k
Input Arguments
Output Arguments
Algorithms
References
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.
[2] Dam, Erik B., Martin Koch, and Martin Lillholm. Quaternions, Interpolation and Animation. Technical Report DIKU-TR-98/5. Department of Computer Science, University of Copenhagen, July 17, 1998. https://web.mit.edu/2.998/www/QuaternionReport1.pdf.
Extended Capabilities
Version History
Introduced in R2025a