uscale
Scale uncertainty of block or system
Description
blk_scaled = uscale(blk,factor)factor. Typically, factor is a robustness margin
returned by robstab or robgain, or a robust performance returned by musynperf. The
uncertain element blk_scaled is of the same type as
blk, with the amount of uncertainty scaled in normalized units. For
instance, if factor is 0.75, the normalized uncertainty of
blk_scaled is 75% of the normalized uncertainty of
blk.
Examples
Consider a feedback loop with the following open-loop gain.
L = tf(3.5,[1 2 3 0]);
Suppose that the system has gain uncertainty of 1.5 (gain can increase or decrease by a factor of 1.5) and phase uncertainty of ±30°.
DGM = getDGM(1.5,30,'tight'); F = umargin('F',DGM)
Uncertain gain/phase "F" with relative gain change in [0.472,1.5] and phase change of ±30 degrees. Block Properties
Examine the robust stability of the closed-loop system.
T = feedback(L*F,1); SM = robstab(T)
SM = struct with fields:
LowerBound: 0.8303
UpperBound: 0.8319
CriticalFrequency: 1.4482
robstab shows that the system can only tolerate 0.83 times the modeled uncertainty before going unstable. Scale the umargin block F by this amount to find the largest gain and phase variation that the system can tolerate.
factor = SM.LowerBound; Fsafe = uscale(F,factor)
Uncertain gain/phase "F" with relative gain change in [0.563,1.42] and phase change of ±24.8 degrees. Block Properties
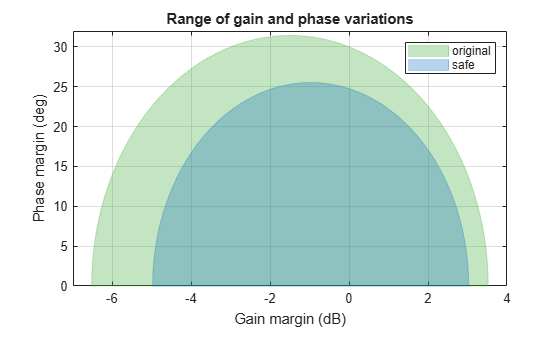
The scaled uncertainty has smaller ranges of both gain variation and phase variation. Compare these ranges for the original modeled variation and the maximum tolerable variation.
DGM = F.GainChange; DGMsafe = Fsafe.GainChange; diskmarginplot([DGM;DGMsafe]) legend('original','safe')
Consider the uncertain control system of the example "Robust Performance of Closed-Loop System" on the robgain reference page. That example examines the sensitivity of the closed-loop response at the plant output to disturbances at the plant input.
k = ureal('k',10,'Percent',40); delta = ultidyn('delta',[1 1]); G = tf(18,[1 1.8 k]) * (1 + 0.5*delta); C = pid(2.3,3,0.38,0.001); S = feedback(1,G*C)
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 4 states. The model uncertainty consists of the following blocks: delta: Uncertain 1x1 LTI, peak gain = 1, 1 occurrences k: Uncertain real, nominal = 10, variability = [-40,40]%, 1 occurrences Model Properties Type "S.NominalValue" to see the nominal value and "S.Uncertainty" to interact with the uncertain elements.
Suppose that you do not want the peak gain of this sensitivity function to exceed 1.5. Use robgain to find out how much of the modeled uncertainty the system can tolerate while the peak gain remains below 1.5.
perfmarg = robgain(S,1.5)
perfmarg = struct with fields:
LowerBound: 0.7821
UpperBound: 0.7837
CriticalFrequency: 7.8566
With that performance requirement, the system can only tolerate about 78% of the modeled uncertainty. Scale all the uncertain elements in S to create a model of the closed-loop system with the maximum level of uncertainty that meets the performance requirement.
factor = perfmarg.LowerBound; S_scaled = uscale(S,factor)
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 4 states. The model uncertainty consists of the following blocks: delta: Uncertain 1x1 LTI, peak gain = 0.782, 1 occurrences k: Uncertain real, nominal = 10, variability = [-31.3,31.3]%, 1 occurrences Model Properties Type "S_scaled.NominalValue" to see the nominal value and "S_scaled.Uncertainty" to interact with the uncertain elements.
The display shows how the uncertain elements in S_scaled have changed: the peak gain of the ultidyn element delta is reduced from 1 to 0.78, and the range of variation of the uncertain real parameter k is reduced from ±40% to ±31.3%.
Input Arguments
Output Arguments
Version History
Introduced in R2020a
See Also
normalized2actual | actual2normalized | musynperf | robstab | robgain