Gyroscope
Measure yaw rotation in degrees
Add-On Required: This feature requires the Simulink Coder Support Package for ARM Cortex-based VEX Microcontroller add-on.
Libraries:
Simulink Coder Support Package for ARM Cortex-based VEX
Microcontroller/Sensors
Description
Add-On Required: This feature requires the Simulink Coder Support Package for ARM Cortex-based VEX Microcontroller add-on.
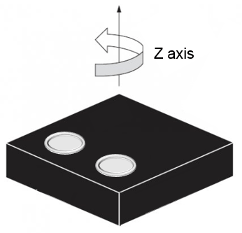
The Gyroscope block measures the angle of rotation (yaw) along the single axis of the gyroscope sensor. In the graphic, the arrow above the vertical axis indicates yaw. The direction of the arrow shows the positive direction of the reading for the gyroscope sensor.
The block outputs angle (in degrees) as a double-precision scalar value. When you rotate the gyroscope sensor in a clockwise direction, the tick count decreases. When you rotate the encoder in a counterclockwise direction, the tick count increases.
Using the Calibration multiplier parameter, calibrate the gyroscope and reduce drifts in the gyroscope sensor readings. Drifts are positive or negative bias introduced in the readings due to the external factors such as temperature, mechanical vibration, and motor magnetic field influence. A calibrated sensor helps you reduce drifts and obtain an acceptable range of accuracy in the readings from the sensor. To learn how to calibrate the gyroscope sensor, see Turn Robot Using LCD Button Press and Display Gyroscope Reading on LCD Screen.
During simulations, without the hardware, this block emits zeros if there is no source block connected to the simulation input port. See Block Produces Zeros or Does Nothing in Simulation. To achieve simulation behavior, connect a source block from the Utilities library in VEX microcontroller library.
During code generation, any simulation block that is connected to the input port of the Gyroscope block is ignored and has no effect on the generated code.
For the code generated from this block to work properly with the gyroscope sensor, connect a VEX 7.2 volt battery to the microcontroller. Before you download the program to the VEX microcontroller, turn on the battery. After turning on the battery, do not move the robot on which the gyroscope sensor is mounted for proper initialization of the gyroscope.
Ports
Input
Output
Parameters
Select the analog port number on the microcontroller to which the gyroscope sensor is connected.
Specify a value to remove positive or negative bias in the output of the block readings. To calibrate the sensor, try different ranges until an acceptable range of accuracy is achieved.
When the gyroscope reading is greater than the actual rotation, decrease the Calibration multiplier value. When the gyroscope reading is less than the actual rotation, increase the Calibration multiplier value.
In the example table, assume that the block sample time is 1 second. The rotation angle at time instant T = 0 is 0 degrees.
The different reset modes that this block supports are:
No reset– The gyroscope reading is not reset and the block outputs the total angle of rotation.For example, in the table, at T = 1, the gyroscope sensor rotates 20 degrees in a counterclockwise direction, and therefore, the output is 20.
Between T = 1 and T = 2, the gyroscope sensor rotates 10 degrees in a counterclockwise direction. Therefore, the yaw rotation is 30 at T = 2 (20 from T = 1 and 10 from T = 2).
In this reset mode, the output at any time instant is a cumulative sum of the previous yaw rotation and the current yaw rotation.
Reset at each sample time– For each sample period, the block outputs the gyroscope reading, and then resets it to 0.For example, in the table, at T = 1, the gyroscope sensor rotates 20 degrees in a counterclockwise direction, and therefore, the output is 20.
Between T = 1 and T = 2, the gyroscope sensor rotates 10 degrees in a counterclockwise direction, and therefore, the output is 10.
In this reset mode, the output is the yaw rotation at a particular time instant.
Reset by external signal– The gyroscope reading is reset to 0 based on the input value toRstport. When you send a value other than 0 to the block input, the gyroscope reading is reset to 0. For each sample period, the block outputs the gyroscope reading since the last reset.For example, in the table, when the external signal is 0, the output is calculated the same as in the
No resetmode. When the external signal is nonzero, the output is calculated the same as in theReset at each sample timemode.

If you want the normal mode simulation with a source block providing the input value, select this parameter.
Specify how often the block reads the rotation, in seconds.
Dependencies
If you set the Reset mode parameter to Reset
by external signal or select the Add input
port for simulation parameter, the Sample time parameter
is hidden and the value is inherited (Sample time = -1).
Version History
Introduced in R2017a