Translational Friction
Attrito da contatto tra corpi in movimento

Librerie:
Simscape /
Foundation Library /
Mechanical /
Translational Elements
Descrizione
Il blocco Translational Friction rappresenta l'attrito da contatto tra corpi in movimento. La forza di attrito viene simulata in funzione della velocità relativa e si ipotizza che sia data dalla somma dei componenti di Stribeck, Coulomb e viscoso, come illustrato nella figura seguente.
![]()
L'attrito di Stribeck, FS, è la caratteristica a pendenza negativa che si verifica a basse velocità [1]. L'attrito di Coulomb, FC, determina una forza costante a qualsiasi velocità. L'attrito viscoso, FV, oppone resistenza al movimento con una forza direttamente proporzionale alla velocità relativa. La somma degli attriti di Coulomb e di Stribeck in prossimità della velocità zero viene spesso definita attrito di distacco, Fbrk. L'attrito viene approssimato con le seguenti equazioni:
dove
F è la forza di attrito.
FC è l'attrito di Coulomb.
Fbrk è l'attrito di distacco.
vbrk è la velocità dell'attrito di distacco.
vSt è la soglia di velocità di Stribeck.
vCoul è la soglia di velocità di Coulomb.
vR e vC sono rispettivamente le velocità assolute delle porte R e C.
v è la velocità relativa.
f è il coefficiente di attrito viscoso.
La funzione esponenziale utilizzata nel componente di Stribeck dell'equazione della forza è continua e decresce quando le grandezze della velocità sono maggiori della velocità dell'attrito di distacco.
La funzione tangente iperbolica utilizzata nel componente di Coulomb dell'equazione della forza garantisce che l'equazione sia regolare e continua attraverso v = 0, ma raggiunge rapidamente il suo valore massimo a velocità diverse da zero.
La direzione positiva del blocco va dalla porta R alla porta C. Questo significa che se la velocità della porta R è maggiore di quella della porta C, il blocco trasmette la forza da R a C.
Variabili
Per impostare la priorità e i valori target iniziali delle variabili del blocco prima della simulazione, utilizzare la sezione Initial Targets nella finestra di dialogo del blocco o nel Property Inspector (Controllo delle proprietà). Per ulteriori informazioni, consultare Set Priority and Initial Target for Block Variables.
I valori nominali consentono di specificare la grandezza prevista di una variabile in un modello. Utilizzare un ridimensionamento del sistema basato sui valori nominali aumenta la robustezza della simulazione. I valori nominali possono provenire da diverse sorgenti, una delle quali è la sezione Nominal Values nella finestra di dialogo del blocco o nel Property Inspector (Controllo delle proprietà). Per ulteriori informazioni, consultare Modify Nominal Values for a Block Variable.
Esempi
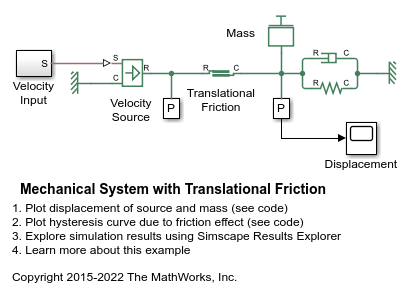
Sistema meccanico con attrito traslazionale
Questo esempio mostra una massa collegata a una molla e a uno smorzatore viscoso. La massa è azionata da una sorgente di velocità ideale attraverso un elemento di attrito. Il profilo di movimento della sorgente è selezionato in modo tale che, tracciando lo spostamento della massa rispetto allo spostamento fornito dalla sorgente, si ottenga una curva tipica di isteresi.
Porte
Conservazione
Parametri
La forza di attrito di distacco, che è data dalla somma dell'attrito di Coulomb e dell'attrito statico. Deve essere maggiore o uguale al valore Coulomb friction force.
La velocità alla quale l'attrito di Stribeck raggiunge il suo picco. A questo punto, la somma dell'attrito di Stribeck e di Coulomb è pari a Breakaway friction force. Questo parametro specifica la soglia di velocità, che influisce sul compromesso tra precisione e velocità della simulazione.
![]()
La coppia di forza di Coulomb, che è l'attrito che si oppone al movimento con una forza costante a qualsiasi velocità.
Coefficiente di proporzionalità tra la forza di attrito e la velocità relativa. Il valore del parametro deve essere maggiore o uguale a zero.
Riferimenti
[1] Armstrong, B. and C.C. de Wit, Friction Modeling and Compensation, The Control Handbook, CRC Press, 1995.
Funzionalità estese
Cronologia versioni
Introdotto in R2007a
Vedi anche
Translational Damper | Translational Hard Stop | Translational Spring