Funzionamento delle modalità di accelerazione
Panoramica
Le modalità di accelerazione e accelerazione rapida utilizzano parti del prodotto Simulink® Coder™ per creare una destinazione della simulazione.
Le modalità di accelerazione e accelerazione rapida sostituiscono il codice interpretato normalmente utilizzato nelle simulazioni di Simulink, riducendo il tempo di esecuzione del modello.
Sebbene le modalità di accelerazione utilizzino alcune delle tecnologie di generazione di codice di Simulink Coder, non è necessario che il software Simulink Coder sia installato per accelerare il modello.
Nota
Il codice generato dalle modalità di accelerazione e accelerazione rapida è adatto solo per accelerare la simulazione del modello. Per generare codice per altri scopi, utilizzare Simulink Coder.
Modalità normale
In modalità normale, l'ambiente di calcolo tecnico di MATLAB® è la base su cui si integra il software Simulink. Simulink controlla il risolutore e i metodi del modello utilizzati durante la simulazione. I metodi del modello includono, ad esempio, il calcolo degli output del modello. La modalità normale viene eseguita in un unico processo.

Modalità di accelerazione
Per impostazione predefinita, la modalità di accelerazione utilizza l'accelerazione Just-in-Time (JIT) per generare un motore di esecuzione in memoria anziché codice C o file MEX. È inoltre possibile riportare il modello alla modalità di accelerazione classica, in cui Simulink genera e collega il codice in una C-MEX S-function.
In modalità di accelerazione, i metodi del modello sono separati dal software Simulink e fanno parte del codice del target di accelerazione, utilizzato nelle simulazioni successive.
Simulink controlla che il codice del target di accelerazione sia aggiornato prima di riutilizzarlo. Per ulteriori informazioni, vedere Code Regeneration in Accelerated Models.
Sono disponibili due modalità di funzionamento in modalità di accelerazione.
Modalità di accelerazione Just-In-Time
In questa modalità predefinita, Simulink genera un motore di esecuzione in memoria solo per il modello ad alto livello e non per i modelli referenziati. Di conseguenza, non è necessario un compiler C durante la simulazione.

Poiché il codice del target di accelerazione è in memoria, è disponibile per il riutilizzo finché il modello è aperto. Simulink inoltre serializza il codice del target di accelerazione affinché il modello non debba essere ricostruito quando viene aperto.
Modalità di accelerazione classica
Se si desidera simulare il modello utilizzando la modalità di accelerazione classica che genera codice C, eseguire il seguente comando:
set_param(0,'GlobalUseClassicAccelMode','on');
In questa modalità, Simulink genera e collega il codice in una libreria condivisa che comunica con il software Simulink. Il codice target viene eseguito nello stesso processo di MATLAB e Simulink.

Modalità di accelerazione rapida
La modalità di accelerazione rapida crea una destinazione della simulazione di accelerazione rapida dal modello. Questa destinazione della simulazione include il risolutore e i metodi del modello, ma si trova al di fuori di MATLAB e Simulink. Utilizza la comunicazione tra processi per comunicare con Simulink.
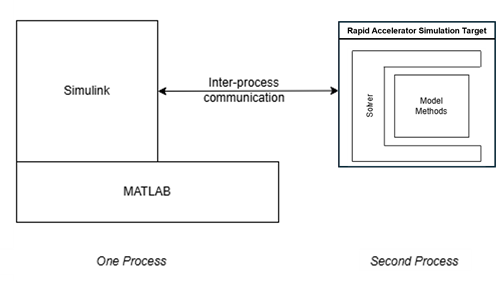
MATLAB e Simulink vengono eseguiti in un processo e, se è disponibile una seconda base di elaborazione, la destinazione della simulazione viene eseguita su tale base.