Implementazione di comportamenti per la simulazione di modelli di architettura
Un workflow di ingegneria dei sistemi di base in System Composer™ include la composizione di un sistema di architettura, la definizione dei requisiti, l'aggiunta di metadati, l'esecuzione di analisi e la rappresentazione dell'architettura attraverso viste. Dopo aver completato queste fasi, la progettazione del sistema sarà più vicina al raggiungimento degli obiettivi degli stakeholder e delle esigenze dei clienti.
È inoltre possibile iniziare a progettare i componenti effettivi del sistema utilizzando Simulink®, Stateflow® e Simscape™. È possibile specificare, testare e analizzare completamente il comportamento di un componente utilizzando il processo di progettazione Model-Based.
Per maggiori informazioni sul workflow di ingegneria dei sistemi Model-Based in System Composer, vedere Composizione e analisi dei sistemi utilizzando modelli di architettura.
In questo tutorial, verranno eseguite queste fasi sul modello di architettura del braccio robotico.
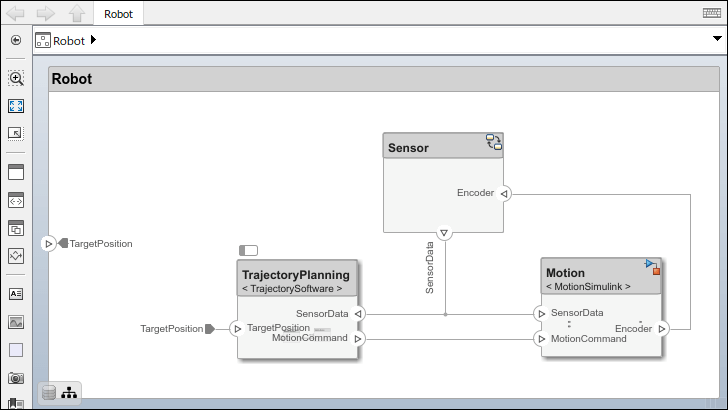
Modello di architettura del braccio robotico
Aprire il modello di architettura di un braccio robotico composto da sensori, attuatori di movimento e un algoritmo di pianificazione. È possibile utilizzare System Composer per visualizzare le interfacce e gestire i requisiti per questo modello.

Creazione di un riferimento a un modello comportamentale di Simulink in un componente
Quando un componente non richiede un'ulteriore scomposizione architetturale, è possibile abilitare la simulazione del modello e un workflow end-to-end. Per abilitare la simulazione del modello, implementare i comportamenti di Simulink per i componenti. È possibile associare un modello di Simulink a un componente o collegarlo a un modello o a un sottosistema di Simulink esistente.
Selezionare il componente
Motion. Andare a Modeling > Create Simulink Behavior. In alternativa, fare clic con il tasto destro del mouse sul componenteMotion, selezionareCreate Behavior, quindi selezionareSimulink Behavior.Dall'elenco Type, selezionare
Model Reference. Fornire il nome del modelloMotionSimulink. Il nome predefinito è il nome del componente.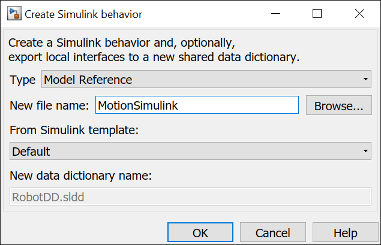
Fare clic su OK. Nella cartella attuale viene creato un nuovo file del modello di Simulink con il nome fornito. Le porte a livello di radice del modello di Simulink riflettono le porte del componente. Il componente nel modello di architettura è collegato al modello di Simulink. L'icona
 sul componente indica che il componente ha un comportamento di Simulink.
sul componente indica che il componente ha un comportamento di Simulink.Nota
Per rimuovere il comportamento del modello, fare clic con il tasto destro del mouse sul componente
Motioncollegato e selezionare Inline Model.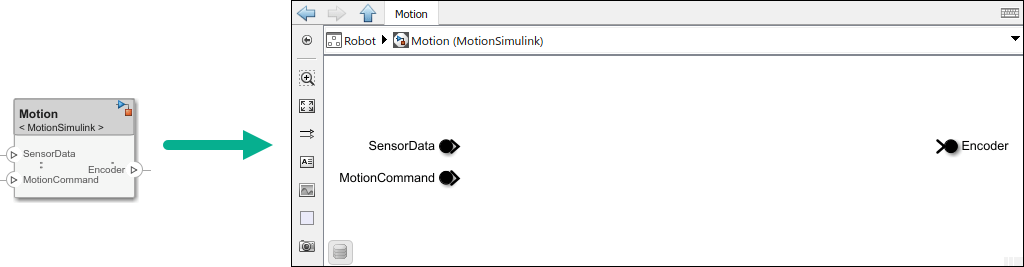
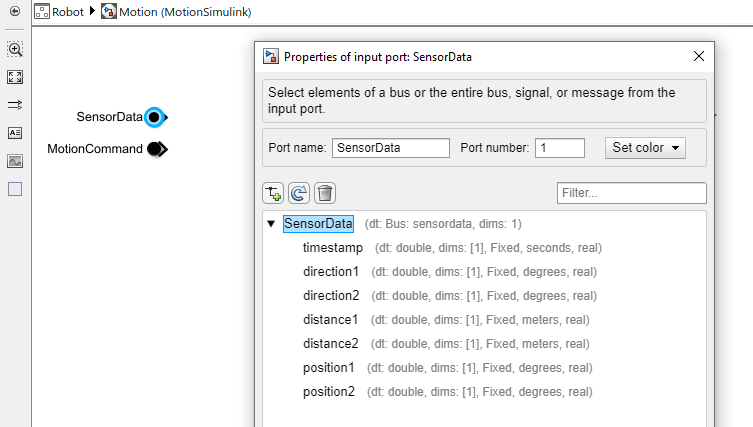
Per visualizzare le interfacce sulla porta SensorData convertire in elementi bus di Simulink, fare doppio clic sulla porta in Simulink.
È anche possibile creare un collegamento a un modello di comportamento di Simulink esistente da un componente System Composer, a condizione che tale componente non sia già collegato a un'architettura di riferimento. Fare clic con il tasto destro del mouse sul componente e selezionare Link to Model. È possibile digitare o sfogliare il nome di un modello di Simulink.
È inoltre possibile collegare un comportamento del sottosistema di Simulink referenziato a un componente. Utilizzare i riferimenti al sottosistema per creare comportamenti di Simulink o di Simscape con porte fisiche, collegamenti e blocchi.
Selezionare il componente
Motion. Andare a Modeling > Create Simulink Behavior. In alternativa, fare clic con il tasto destro del mouse sul componenteMotion, selezionareCreate Behavior, quindi selezionareSimulink Behavior.Dall'elenco Type, selezionare
Subsystem Reference. Fornire il nome del modelloMotionSubsystem. Il nome predefinito è il nome del componente.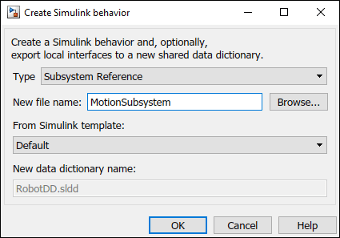
Fare clic su OK. Nella cartella attuale viene creato un nuovo file del sottosistema di Simulink con il nome fornito. Le porte a livello di radice del sottosistema di Simulink riflettono le porte del componente. Il componente nel modello di architettura è collegato al sottosistema di Simulink. L'icona
 sul componente indica che il componente ha un comportamento del sottosistema di Simulink.
sul componente indica che il componente ha un comportamento del sottosistema di Simulink.
Aggiunta del comportamento del grafico Stateflow al componente
Per implementare la modellazione event-based con macchine a stati, aggiungere il comportamento del grafico Stateflow a un componente. I grafici di stato sono costituiti da un insieme finito di stati con transizioni tra loro, volte ad acquisire le modalità operative del componente. Questa funzionalità richiede una licenza Stateflow.
Un componente System Composer con stereotipi, interfacce, collegamenti ai requisiti e porte viene conservato quando si aggiunge il comportamento di Stateflow Chart (Stateflow).
Fare clic con il tasto destro del mouse sul componente
Sensor, selezionareCreate Behavior, quindi selezionareStateflow Behavior. In alternativa, selezionare il componenteSensor, quindi andare a Modeling > Create Stateflow Chart Behavior.Fare doppio clic su
Sensor, che presenta l'icona Stateflow. Dal menu Modeling, fare clic su Symbols Pane per visualizzare i simboli Stateflow. La porta di input Encoder appare come dati di input nel riquadro dei simboli e la porta di output SensorData appare come dati di output.
Selezionare l'output SensorData e visualizzare l'interfaccia in Property Inspector. È possibile accedere a questa interfaccia come un segnale bus di Simulink.

Progettazione dell'architettura software nei componenti
Per progettare un'architettura software, definire l'ordine di esecuzione delle funzioni, simulare e generare codice, creare un'architettura software da un componente System Composer.
Rinominare il componente
Trajectory PlanninginTrajectoryPlanning, in modo che sia un nome di variabile C valido.Fare clic con il tasto destro del mouse sul componente
TrajectoryPlanning, selezionareCreate Architecture, quindi selezionareSoftware Architectureoppure andare a Modeling > Create Software Architecture Model.Specificare il nome dell'architettura software come
TrajectorySoftware. Fare clic su OK.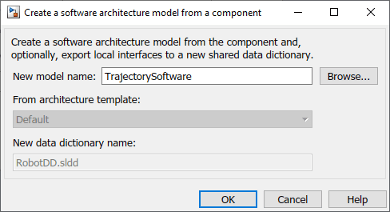
Il modello di architettura software
TrajectorySoftware.slxè referenziato dal componenteTrajectoryPlanning.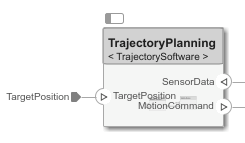
Fare doppio clic sul componente
TrajectoryPlanningper interagire con il componente softwareTrajectorySoftware.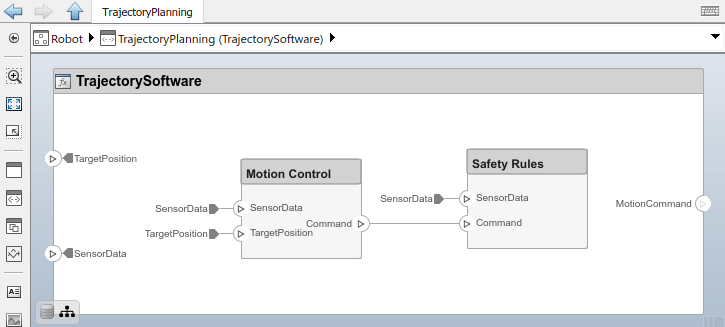
Rappresentazione dell'interazione del sistema utilizzando diagrammi di sequenza
Per rappresentare l'interazione tra gli elementi strutturali di un'architettura come una sequenza di scambi di messaggi, utilizzare un diagramma di sequenza in Architecture Views Gallery.
Osservare il modello di architettura del braccio robotico costituito da componenti, porte, collegamenti e comportamenti. I risultati della simulazione del modello devono corrispondere alle interazioni all'interno dei diagrammi di sequenza.
Creare un nuovo diagramma di sequenza andando a Modeling > Sequence Diagram. Si apre Architecture Views Gallery. Per creare un nuovo diagramma di sequenza, fare clic su
 New > Sequence Diagram.
New > Sequence Diagram.Un nuovo diagramma di sequenza denominato
SequenceDiagram1viene creato nel browser delle viste e la scheda Sequence Diagram diventa attiva. In Sequence Diagram Properties, rinominare il diagramma di sequenzaRobotArmSequence.Selezionare Component > Add Lifeline
 per aggiungere una lifeline. Viene creata una nuova lifeline senza nome, indicata da una linea tratteggiata.
per aggiungere una lifeline. Viene creata una nuova lifeline senza nome, indicata da una linea tratteggiata.Fare clic sulla freccia verso il basso e selezionare
Sensor. Aggiungere una seconda lifeline denominataMotion.Selezionare la linea tratteggiata verticale per la lifeline
Sensor. Fare clic e trascinare sulla lifelineMotion. Nella casella To, iniziare a digitareSensordatae selezionareSensorDatadal menu a discesa. Viene creato un messaggio dalla porta SensorData sul componenteSensoralla porta SensorData sul componenteMotion.Fare clic sul messaggio per verificare dove inserire la condizione del messaggio. Inserire una condizione di attivazione del messaggio nel modulo:
rising(SensorData.distance1-1)
Il nome del segnale è un elemento dati su un'interfaccia dati. Il messaggio verrà riconosciuto all'evento di attraversamento dello zero quando il valore di
SensorData.distance1sale a 1.

Vedi anche
Argomenti
- Creazione di un modello di architettura con interfacce e collegamenti ai requisiti
- Estensione della progettazione architetturale utilizzando gli stereotipi
- Analisi delle proprietà del modello di architettura con la funzione di analisi
- Esame dei componenti nelle viste dell'architettura personalizzata
- Concetti di System Composer