Simulation 3D Tractor
Implement tractor in 3D environment
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Vehicle /
Components
Description
Note
Simulating models with the Simulation 3D Tractor block requires Simulink® 3D Animation™.
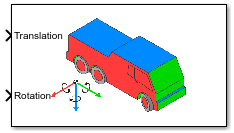
The Simulation 3D Tractor block implements a three-axle tractor in the 3D simulation environment.
To use the Simulation 3D Tractor block, ensure that the Simulation
3D Scene Configuration block is in your model. If you set the Sample
time parameter of the Simulation 3D Tractor block to
-1, the block uses the sample time specified in the Simulation 3D
Scene Configuration block.
The block input uses the vehicle Z-down right-handed (RH) Cartesian coordinate system defined in SAE J6701. The coordinate system is inertial and initially aligned with the vehicle geometric center:
X-axis — Points forward along vehicle longitudinal axis
Y-axis — Points to the right along vehicle lateral axis
Z-axis — Points downward
Tip
Verify that the Simulation 3D Tractor
block executes before the Simulation 3D Scene Configuration block. That way,
Simulation 3D Vehicle prepares the signal data before the Unreal Engine® 3D visualization environment receives it. To check the block execution order,
right-click the blocks and then click the Properties button ![]() . On the General tab, confirm these
Priority settings:
. On the General tab, confirm these
Priority settings:
Simulation 3D Scene Configuration —
0Simulation 3D Tractor —
-1
For more information about execution order, see Control and Display Execution Order.
Examples

Three-Axle Tractor Towing a Three-Axle Trailer
Simulates three-axle tractor towing a three-axle trailer for commercial trucking applications. Implements hitch subsystem, sinusoidal wave steering or braking test, and axle torque applied to tractor rear wheels.
Ports
Input
Parameters
References
[1] Vehicle Dynamics Standards Committee. Vehicle Dynamics Terminology. SAE J670. Warrendale, PA: Society of Automotive Engineers, 2008.
[2] Technical Committee. Road vehicles — Vehicle dynamics and road-holding ability — Vocabulary. ISO 8855:2011. Geneva, Switzerland: International Organization for Standardization, 2011.