


- /
-
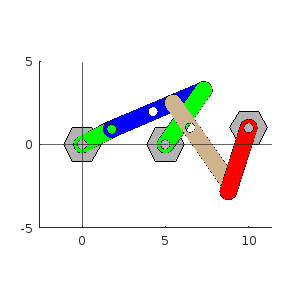
Six-Linked Bars Mechanism
on 29 Nov 2023
- 24
- 245
- 0
- 2
- 1964
drawframe(1);
Write your drawframe function below
function drawframe(f)
persistent L1 L2 L3 L4 L5 L6 L7 L8 t2 t3 t4 t5 t6 ...
Bar2 Bar3 Bar4 Bar5 Bar6 f1 f2
if f==1
L1=5;
L2=2;
L3=6;
L4=4;
L5=6;
L6=4;
L7=5;
L8=1;
f1=@(t2,t)(L2*cos(t2)-(L1+L4*cos(t)))^2+(L2*sin(t2)-L4*sin(t))^2-L3^2;
f2=@(x5,y5,T)[x5+L5*cos(T(1))-(L1+L7+0.9*L6*cos(T(2)))
y5+L5*sin(T(1))-(L8+0.9*L6*sin(T(2)))];
t=linspace(0,2*pi,7);
brown=[206,179,140]/255;
s=sin(t);
c=cos(t);
R=1.15;
wclr=0.7*[1,1,1];
hold on;
fill(R*c,R*s,wclr);
fill(L1+R*c,R*s,wclr);
fill((L1+L7)+R*c,L8+R*s,wclr);
xline(0);
yline(0);
axis equal
t4=acos(((L2+L3)^2-L1^2-L4^2)/(2*L1*L4));
c4=cos(t4);
s4=sin(t4);
t2=asin(sin(t4*L4/(L2+L3)));
c2=cos(t2);
s2=sin(t2);
x3=L2*c2;
y3=L2*s2;
t3=atan2(L4*s4-L2*s2,L1+L4*c4-L2*c2);
x5=L2*c2+(2/3)*((L1+L4*c4)-L2*c2);
y5=L2*s2+(2/3)*(L4*s4-L2*s2);
t56=fsolve(@(T)f2(x5,y5,T),[1.5*pi;1.5*pi]);
t5=t56(1);
t6=t56(2);
Bar2=BarMaker(L2,'g',0);
Bar2.Rotate(t2);
Bar3=BarMaker(L3,'b',[0,0.45]);
Bar3.Rotate(t3);
Bar3.Trans([x3,y3]);
Bar4=BarMaker(L4,'g',0);
Bar4.Rotate(t4);
Bar4.Trans([L1,0]);
Bar5=BarMaker(L5,brown,0.3);
Bar5.Rotate(t5);
Bar5.Trans([x5,y5]);
Bar6=BarMaker(L6,'r',0);
Bar6.Rotate(t6);
Bar6.Trans([L1+L7,L8]);
axis([-2.6,11.4,-5,5])
else
t2=t2+2*pi/48;
c2=cos(t2);
s2=sin(t2);
x3=L2*c2;
y3=L2*s2;
t4=fzero(@(t)f1(t2,t),t4);
c4=cos(t4);
s4=sin(t4);
t3=atan2(L4*s4-L2*s2,L1+L4*c4-L2*c2);
x5=L2*c2+(2/3)*((L1+L4*c4)-L2*c2);
y5=L2*s2+(2/3)*(L4*s4-L2*s2);
t56=fsolve(@(T)f2(x5,y5,T),[t5;t6]);
t5=t56(1);
t6=t56(2);
Bar2.Rotate(t2);
Bar3.Rotate(t3);
Bar3.Trans([x3,y3]);
Bar4.Rotate(t4);
Bar5.Rotate(t5);
Bar5.Trans([x5,y5]);
Bar6.Rotate(t6);
end
end
function B=BarMaker(L,clr,F)
t1=pi/2+linspace(0,pi);
t2=t1+pi;
s1=sin(t1);
s2=sin(t2);
c1=cos(t1);
c2=cos(t2);
Xl=[0.5*c1,L+0.5*c2];
Yl=[0.5*s1,0.5*s2];
X=Xl;
Y=Yl;
Xl=[Xl,Xl(1)];
Yl=[Yl,Yl(1)];
for n=1:numel(F)
f=F(n);
X=[X,f*L,f*L+0.3*[c1,c2],f*L];
Y=[Y,0.5,0.3*[s1,s2],0.5];
Xl=[Xl,nan,f*L+0.3*[c1,c2]];
Yl=[Yl,nan,0.3*[s1,s2]];
end
ax=gca;
H=hgtransform('Parent',ax);
K=hgtransform('Parent',H);
B.line=plot(Xl,Yl,'k','Parent',K);
B.fill=fill(X,Y,clr,'EdgeColor','none','Parent',K);
B.Rotate=@(t)set(K,'Matrix',makehgtform('zrotate',t));
B.Trans=@(p)set(H,'Matrix',makehgtform('translate',[p,0]));
end

