getCollisionData
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
collisionInfo = getCollisionData(descriptor)descriptor.
collisionInfo = getCollisionData(descriptor,Name=Value)Actor1ID=2 checks for collision between the actor with the ID 2, and
all other actors in the scenario.
Examples
Input Arguments
Name-Value Arguments
Output Arguments
More About
The collision fraction specifies the relative position on the
collision side of a vehicle at which the collision occurs. For example, if the center of the
front edge of the ego vehicle Actor-1 collides with the left corner on
the front edge of the target vehicle Actor-2, then the collision fraction
of Actor-1 is 0.5.
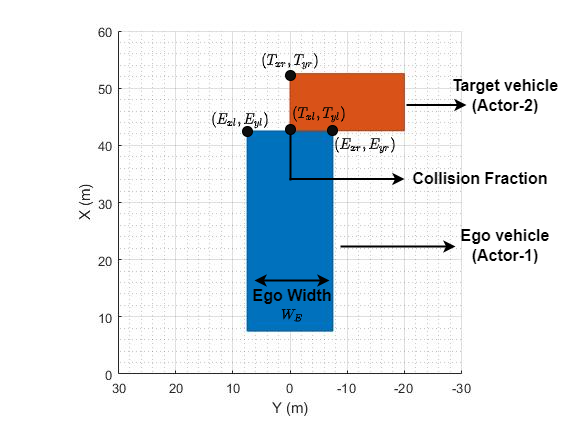
Collision fraction is defined by the equation
where Exl and Eyl are the x- and y-coordinates of the left corner of the ego vehicle collision side, Txl and Tyl are the x- and y-coordinates of the collision point on the target vehicle, and WE is the width of the collision side of the ego vehicle.