Stima dei modelli di processo
Stimare dei modelli di processo a tempo continuo per un sistema a singolo-input, singolo-output (SISO) nel dominio del tempo o della frequenza nel Live Editor
Descrizione
L'attività Estimate Process Model (Stima dei modelli di processo) consente di stimare e validare un modello di processo per sistemi SISO in modo interattivo. È possibile definire e variare la struttura del modello e specificare parametri opzionali, come la gestione della condizione iniziale e i metodi di ricerca. L'attività genera automaticamente il codice MATLAB® per lo script live. Per ulteriori informazioni sulle attività del Live Editor in generale, vedere Add Interactive Tasks to a Live Script.
I modelli di processo sono semplici funzioni di trasferimento a tempo continuo che descrivono la dinamica del sistema lineare. Gli elementi del modello di processo includono il guadagno statico, le costanti di tempo, i ritardi temporali, l'integratore e zeri di processo.
I modelli di processo sono molto diffusi per descrivere la dinamica del sistema in numerosi settori e sono applicabili a vari ambienti di produzione. I vantaggi di questi modelli sono la semplicità, il supporto per la stima del ritardo di trasporto e la facilità di interpretazione dei coefficienti del modello, come poli e zeri. Per ulteriori informazioni sulla stima del modello di processo, vedere What Is a Process Model?
L'attività Estimate Process Model (Stima dei modelli di processo) è indipendente dall'app più generale System Identification. Utilizzare l'app System Identification quando si desidera calcolare e confrontare le stime per più strutture del modello.
Per iniziare, caricare i dati dell'esperimento che contengono i dati di input e output nel workspace di MATLAB, quindi importare i dati nell'attività. Selezionare poi la struttura del modello da stimare. L'attività offre controlli e grafici che consentono di sperimentare diverse strutture di modelli e di confrontare in che misura l'output di ciascun modello si adatta alle misure.

Apri l'attività
Per aggiungere l'attività Estimate Process Model (Stima dei modelli di processo) in uno script live nell'Editor di MATLAB:
Nella scheda Live Editor, selezionare Task > Estimate Process Model.
In un blocco di codice dello script, digitate una parola chiave pertinente, come
processoestimate. SelezionareEstimate Process Modeldai completamenti dei comandi suggeriti.
Esempi
Utilizzare l'attività di Live Editor Estimate Process Model (Stima dei modelli di processo) per stimare un modello di processo e confrontare l'output del modello con i dati di misurazione.
Impostazione dei dati
Caricare i dati di misurazione tt1 nel workspace di MATLAB. tt1 è una tabella orario che contiene una variabile di input u e una variabile di output y.
load sdata1 tt1
Importazione dei dati nell'attività
Nella sezione Select data (Seleziona dati), impostare Data type (Tipo di dati) su Timetable e Estimation data (Dati di stima) su tt1.
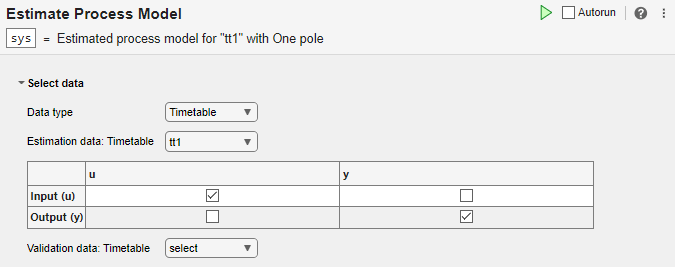
L'attività visualizza una tabella contenente i nomi delle variabili di input e di output tt1.
Stima del modello utilizzando le impostazioni predefinite
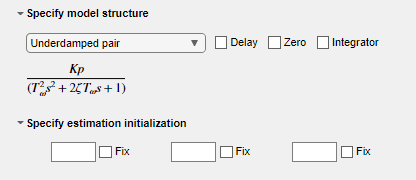
Esaminare la struttura del modello e i parametri opzionali.
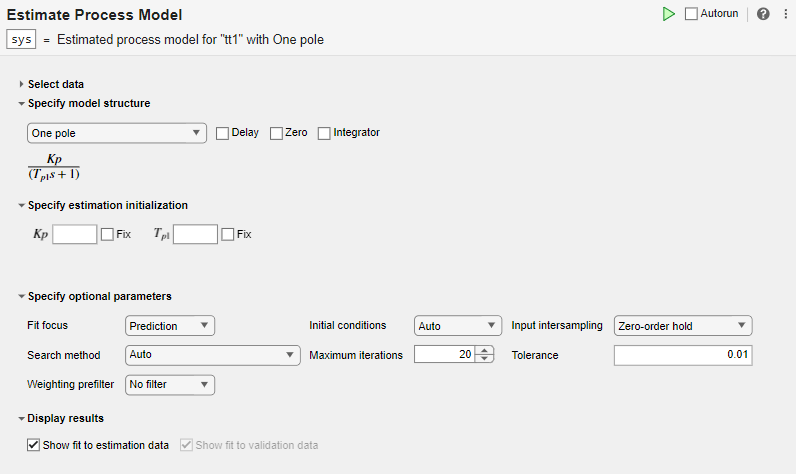
Nella sezione Specify model structure (Specifica struttura del modello), l'opzione predefinita è One Pole, senza ritardi, zero o integratori. Le equazioni sotto i parametri di questa sezione visualizzano la struttura specificata.
Nella sezione Specify estimation initialization (Specifica dell'inizializzazione della stima), i parametri di inizializzazione corrispondenti ai parametri della struttura del modello consentono di impostare i punti di inizio per la stima. Se si seleziona Fix (Fisso), il parametro rimane fisso sul valore specificato. Per questo esempio, non specificare l'inizializzazione. L'attività utilizza quindi i valori predefiniti per i punti di inizio.
Nella sezione Specify optional parameters (Specifica dei parametri opzionali), vengono impostate le opzioni predefinite per la stima del processo.
Eseguire l'attività dalla scheda Live Editor facendo clic sulla freccia verde. È anche possibile selezionare Autorun (Esecuzione automatica) per eseguire automaticamente l'attività ogni volta che si aggiorna un parametro.
![]()
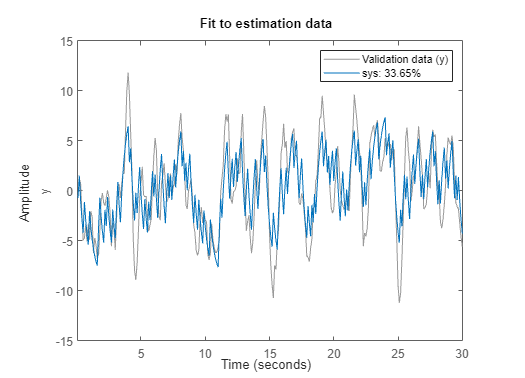
Un grafico mostra i dati di stima, l'output del modello stimato e la percentuale di adattamento.
Sperimentazione delle impostazioni dei parametri
Sperimentare le impostazioni dei parametri e verificare come influenzano l'adattamento.
Ad esempio, aggiungere un ritardo alla struttura One Pole ed eseguire l'attività.

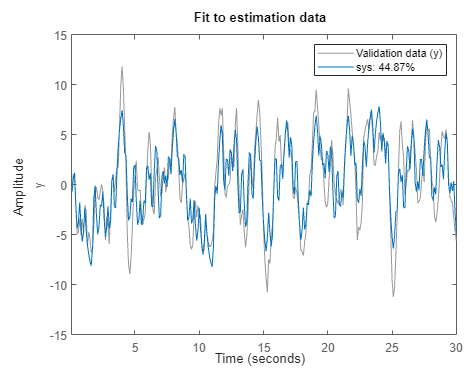
L'adattamento della stima migliora, anche se la percentuale di adattamento è ancora inferiore al 50%.
Provare una diversa struttura del modello. In Specify model structure (Specifica struttura del modello), selezionare Underdamped Pair senza ritardi ed eseguire l'attività.

I risultati dell'adattamento migliorano in modo significativo.
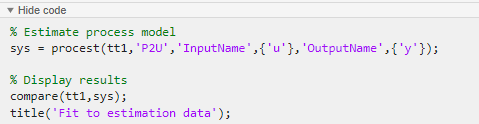
Generazione di codice
Per visualizzare il codice generato dall'attività, fare clic su ![]() in fondo alla sezione dei parametri. Il codice visualizzato riflette la configurazione corrente dei parametri dell'attività.
in fondo alla sezione dei parametri. Il codice visualizzato riflette la configurazione corrente dei parametri dell'attività.
Utilizzare dati di stima e di validazione separati in modo da poter validare il modello di processo stimato.
Impostazione dei dati
Caricare i dati di misurazione sdata1 nel workspace di MATLAB ed esaminarne il contenuto.
load sdata1 umat1 ymat1 Ts
Dividere i dati in due insiemi, una metà per la stima e una metà per la validazione. L'insieme originale dei dati ha 300 campioni, quindi ogni nuovo insieme di dati ha 150 campioni.
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
Importazione dei dati nell'attività
Nella sezione Select data (Seleziona dati), impostare Data type (Tipo di dati) su numerico. Impostare il tempo di campionamento su 0.1 secondi. Selezionare gli insiemi di dati appropriati per la stima e la validazione.

Stima e validazione del modello
L'esempio Stima dei modelli di processo con l'attività di Live Editor ottiene i migliori risultati utilizzando la struttura del modello Underdamped Pair. Scegliere la stessa opzione per questo esempio.

Eseguire l'attività. L'esecuzione dell'attività crea due grafici. Il primo grafico mostra i risultati della stima e il secondo quelli della validazione.

L'adattamento ai dati di stima è leggermente peggiore rispetto a Stima dei modelli di processo con l'attività di Live Editor. Nell'esempio attuale, la stima dispone solo della metà dei dati con cui stimare il modello. L'adattamento ai dati di validazione, che rappresenta in modo più generale la validità del modello, è migliore rispetto all'adattamento ai dati di stima.