Model Configuration and Hardware Deployment
Use these steps to select the target hardware in the Configuration Parameters dialog box.
In the Simulink® model, click Hardware > Hardware Settings to open the Configuration Parameters dialog box.
Open the Hardware Implementation tab and set Hardware board to TI Delfino F28379D LaunchPad.
For any other custom board, navigate to the Hardware Implementation tab of the Configuration Parameters dialog box and select the appropriate processor and edit the peripheral details in Hardware board settings > Target hardware resources.
For the solver and quadrature encoder interface configuration details, see Model Configuration Parameters.
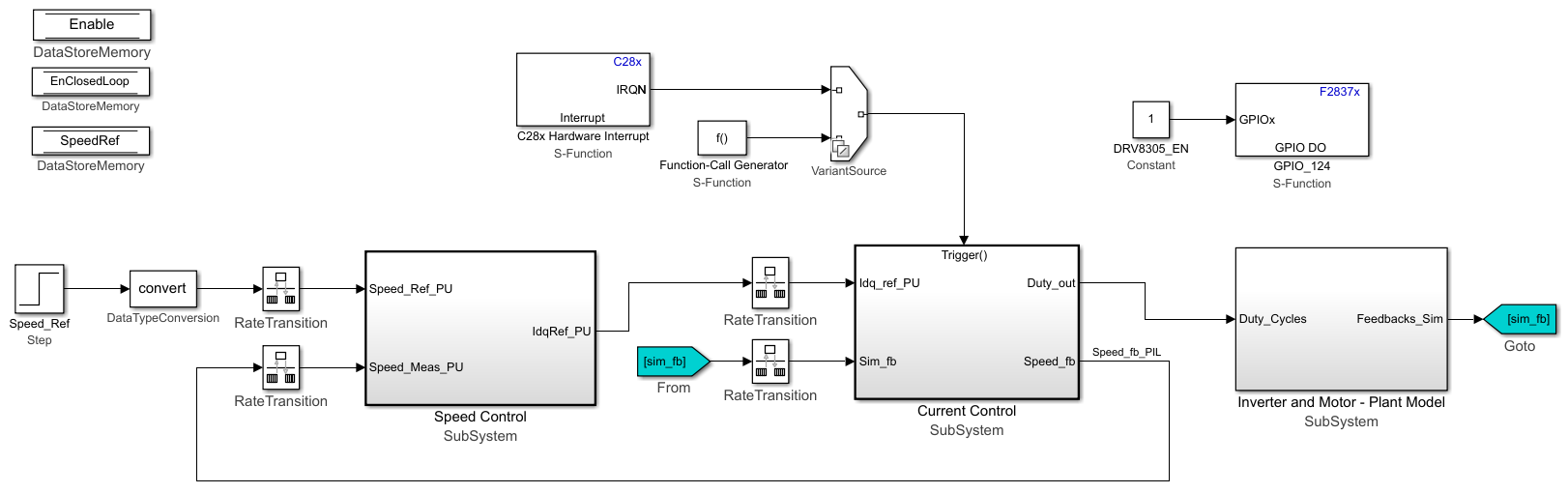
Connect the Texas Instruments® BOOSTXL-DRV8305 board and QEP connector to the Texas Instruments LaunchPad XL hardware board. For hardware connection details related to Texas Instruments C2000 LaunchPadXL, see Hardware Connections. The BOOSTXL-DRV8305 (attached to the LaunchPadXL board) requires an enable signal. This signal is connected to the GPIO124 pin of the processor.
In the Simulink Library Browser, add C2000™ Microcontroller Blockset > F2837xD > Digital Output. In the Digital Output block parameters dialog box, change these settings:
| Parameter in Digital Output Block | Settings |
|---|---|
GPIO Group | GPIO120~GPIO127 |
GPIO124 | on |
Rename the block as GPIO_124.
Add a constant block with the value 1 as an input to the GPIO124
block as shown in this figure.
On the Hardware tab of the Simulink model, select Build, Deploy & Start. This
generates the C code, CCS project, and a target-specific .out file.
The system uses serial communication to download this target specific
.out file to the target hardware and runs the downloaded
algorithm in the hardware.
When the model is deployed to the target, the motor runs in open-loop and then runs in
closed-loop speed control. This example recommends that you use serial communication to
monitor and debug the signals. For details about implementing serial receive and
transmit communications between the host and target models, see the example model
mcb_pmsm_foc_qep_f28379d. From the Serial Receive
block, update the Enable
Data Store Memory block to start and stop the motor using the serial
commands received from the host model.