removeInvalidData
Remove invalid range and angle data
Description
Examples
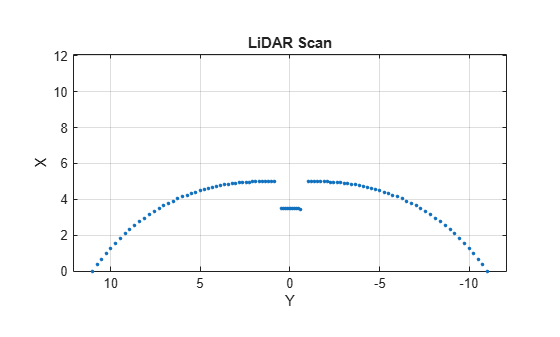
Specify lidar data as vectors of ranges and angles. These values include readings outside of the sensors range.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
Create a lidar scan by specifying the ranges and angles. Plot all points of the lidar scan.
scan = lidarScan(ranges,angles); plot(scan)
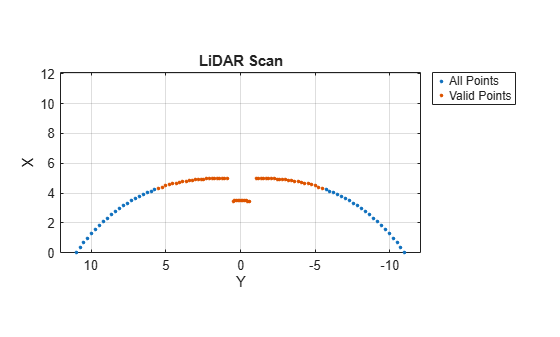
Remove invalid points based on a specified minimum and maximum range.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2019b