matchScans
Estimate pose between two laser scans
Syntax
Description
pose = matchScans(currRanges,currAngles,refRanges,refAngles)
[___] = matchScans(___,Name,Value)
specifies additional options specified by one or more
Name,Value pair arguments.
Examples
Create a reference lidar scan using lidarScan. Specify ranges and angles as vectors.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Using the transformScan (Robotics System Toolbox) function, generate a second lidar scan at an x,y offset of (0.5,0.2).
currScan = transformScan(refScan,[0.5 0.2 0]);
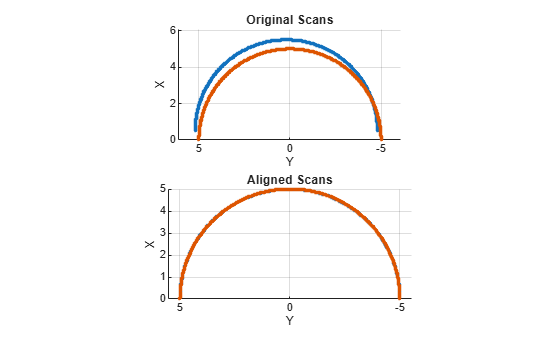
Match the reference scan and the second scan to estimate the pose difference between them.
pose = matchScans(currScan,refScan);
Use the transformScan function to align the scans by transforming the second scan into the frame of the first scan using the relative pose difference. Plot both the original scans and the aligned scans.
currScan2 = transformScan(currScan,pose); subplot(2,1,1); hold on plot(currScan) plot(refScan) title('Original Scans') hold off subplot(2,1,2); hold on plot(currScan2) plot(refScan) title('Aligned Scans') xlim([0 5]) hold off
This example uses the 'fminunc' solver algorithm to perform scan matching. This solver algorithm requires an Optimization Toolbox™ license.
Specify a reference laser scan as ranges and angles.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300);
Using the transformScan (Robotics System Toolbox) function, generate a second laser scan at an x,y offset of (0.5,0.2).
[currRanges,currAngles] = transformScan(refRanges,refAngles,[0.5 0.2 0]);
Match the reference scan and the second scan to estimate the pose difference between them.
pose = matchScans(currRanges,currAngles,refRanges,refAngles,'SolverAlgorithm','fminunc');
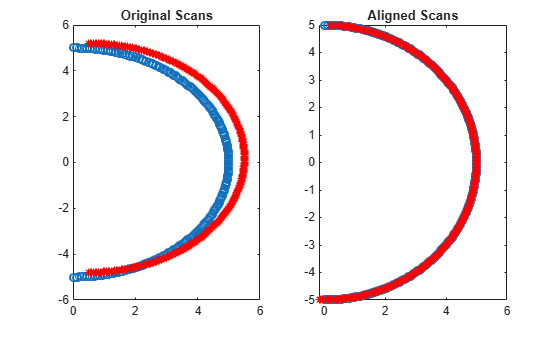
Improve the estimate by giving an initial pose estimate.
pose = matchScans(currRanges,currAngles,refRanges,refAngles,... 'SolverAlgorithm','fminunc','InitialPose',[-0.4 -0.1 0]);
Use the transformScan function to align the scans by transforming the second scan into the frame of the first scan using the relative pose difference. Plot both the original scans and the aligned scans.
[currRanges2,currAngles2] = transformScan(currRanges,currAngles,pose); [x1, y1] = pol2cart(refAngles,refRanges); [x2, y2] = pol2cart(currAngles,currRanges); [x3, y3] = pol2cart(currAngles2,currRanges2); subplot(1,2,1) plot(x1,y1,'o',x2,y2,'*r') title('Original Scans') subplot(1,2,2) plot(x1,y1,'o',x3,y3,'*r') title('Aligned Scans')
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Biber, P., and W. Strasser. "The Normal Distributions Transform: A New Approach to Laser Scan Matching." Intelligent Robots and Systems Proceedings. 2003.
[2] Magnusson, Martin. "The Three-Dimensional Normal-Distributions Transform -- an Efficient Representation for Registration, Surface Analysis, and Loop Detection." PhD Dissertation. Örebro University, School of Science and Technology, 2009.
Extended Capabilities
Version History
Introduced in R2019b