lidarScan
Crea oggetto per memorizzare la scansione LiDAR 2D
Descrizione
Un oggetto lidarScan contiene dati per una singola scansione LiDAR (rilevamento della luce e misurazione della distanza) 2-D. La scansione LiDAR è una scansione laser per un piano 2D con distanze (Ranges) misurate dal sensore agli ostacoli nell'ambiente ad angoli specifici (Angles). Utilizzare questo oggetto di scansione laser come input per altri algoritmi di robotica quali matchScans, controllerVFH o monteCarloLocalization.
Creazione
Descrizione
scan =LiDARScan(ranges,angles)lidarScan da ranges e angles, che rappresentano i dati raccolti da un sensore LiDAR. Gli input ranges e angles sono vettori della stessa lunghezza e vengono impostati direttamente sulle proprietà Ranges e Angles.
scan =LiDARScan(cart)lidarScan utilizzando le coordinate cartesiane di input come una matrice n per 2. La proprietà Cartesian viene impostata direttamente da questo input.
scan =LiDARScan(scanMsg)lidarScan da un oggetto messaggio ROS LaserScan (ROS Toolbox).
Proprietà
Funzioni oggetto
plot | Display laser or lidar scan readings |
removeInvalidData | Remove invalid range and angle data |
transformScan | Transform laser scan based on relative pose |
Esempi
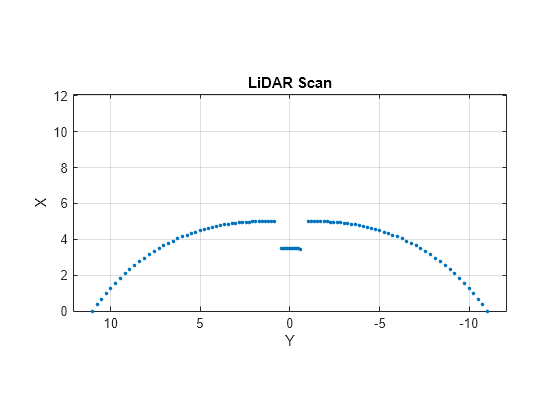
Specificare i dati LiDAR come vettori di intervalli e angoli. Questi valori includono letture al di fuori dell'intervallo dei sensori.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
Crea una scansione LiDAR specificando intervalli e angoli. Rappresentare graficamente tutti i punti della scansione LiDAR.
scan = lidarScan(ranges,angles); plot(scan)
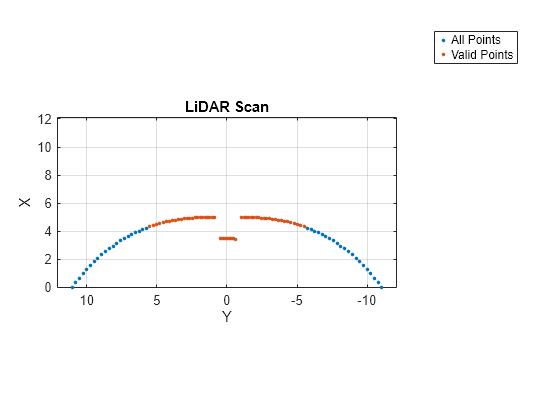
Rimuovi i punti non validi in base a un intervallo minimo e massimo specificato.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
Crea un oggetto lidarScan. Specificare gli intervalli e gli angoli come vettori.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Traslare la scansione laser di un offset [x y] di (0.5,0.2) .
transformedScan = transformScan(refScan,[0.5 0.2 0]);
Ruotare la scansione laser di 20 gradi.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
Crea una scansione LiDAR di riferimento utilizzando lidarScan (Robotics System Toolbox) . Specificare intervalli e angoli come vettori.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Utilizzando la funzione transformScan (Robotics System Toolbox), generare una seconda scansione LiDAR con un offset x,y di (0.5,0.2).
currScan = transformScan(refScan,[0.5 0.2 0]);
Abbina la scansione di riferimento e la seconda scansione per stimare la differenza di posa tra di esse.
pose = matchScans(currScan,refScan);
Utilizzare la funzione transformScan per allineare le scansioni trasformando la seconda scansione nel fotogramma della prima scansione utilizzando la differenza di posa relativa. Rappresentare graficamente sia le scansioni originali sia quelle allineate.
currScan2 = transformScan(currScan,pose); subplot(2,1,1); hold on plot(currScan) plot(refScan) title('Original Scans') hold off subplot(2,1,2); hold on plot(currScan2) plot(refScan) title('Aligned Scans') xlim([0 5]) hold off

Funzionalità estese
Cronologia versioni
Introdotto in R2019b
Vedi anche
matchScans | transformScan | controllerVFH | monteCarloLocalization