validatorVehicleCostmap
State validator based on 2-D costmap
Description
The validatorOccupancyMap object validates states and discretized
motions based on the value in a 2-D costmap. validatorVehicleCostmap interprets an
occupied or unknown map area as an invalid state. A free map area is interpreted as
valid.
Creation
Syntax
Description
validator = validatorVehicleCostmap
validator = validatorVehicleCostmap(stateSpace)nav.StateSpace.
validator = validatorVehicleCostmap(stateSpace,Name,Value)Map or XYIndices properties
using Name,Value pair arguments.
Properties
Object Functions
copy | Create deep copy of state validator object |
isStateValid | Check if state is valid |
isMotionValid | Check if path between states is valid |
Examples
This example shows how to validate paths through an environment.
Load example maps. Use the simple map to create a vehicle cost map. Specify an inflation radius of 1 meter.
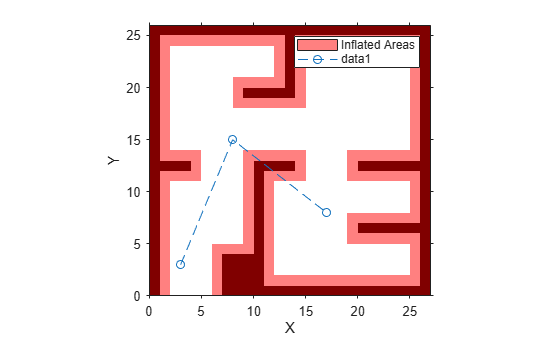
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)

Specify a coarse path through the map.
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
Create a state validator using the stateSpaceSE2 definition. Specify the map and the distance for interpolating and validating path segments.
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Check the points of the path are valid states. All three points are in free space, so are considered valid.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Check the motion between each sequential path states. The isMotionValid function interpolates along the path between states. If a path segment is invalid, plot the last valid point along the path.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off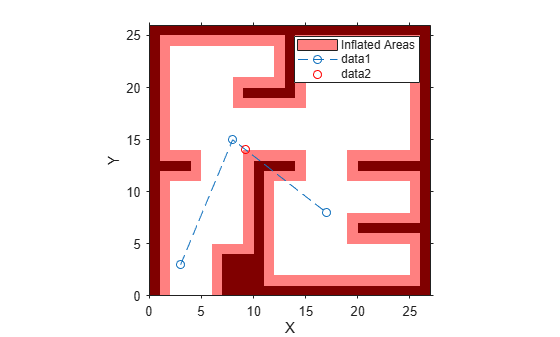
Extended Capabilities
Version History
Introduced in R2019b
See Also
validatorOccupancyMap | stateSpaceSE2 | nav.StateSpace | nav.StateValidator