Cuboid Scenario Simulation
Scenarios with static meshes, robot platforms, sensors
Create and simulate low-fidelity scenarios using the robotScenario object and sensor models such as GPS and lidar to
test your robotics algorithms.
Functions
Topics
- Execute Code at a Fixed-Rate
By executing code at constant intervals, you can accurately time and schedule tasks.
Featured Examples

Simulate Ultrasonic Sensors Mounted on Mobile Robots
Implement a custom sensor adaptor to integrate ultrasonic sensors with robotScenario for mobile robot positioning at a charging station.
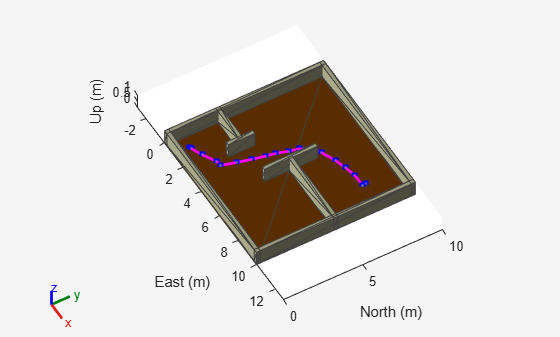
Perform Path Planning Simulation with Mobile Robot
Create a scenario to model a mobile robot, obtain an occupancy grid map from
the scenario and perform path planning using
mobileRobotPRM.

Perform Pick and Place with Collision-Object-Based Obstacle Avoidance in Robot Scenario
Create a collision-object meshes scene and add rigid body tree model to plan motion with RRT and simulate pick-and-place workflow.