ncfmargin
Calculate normalized coprime stability margin of plant-controller feedback loop
Description
[
returns the normalized coprime stability margin of the multivariable feedback loop
consisting of a controller marg,freq] = ncfmargin(P,C)C in negative feedback with a plant
P:
The normalized coprime robust stability margin (also called the gap metric stability margin) is an indication of robustness to unstructured perturbations. Values greater than 0.3 generally indicate good robustness margins.
[
specifies the sign of the feedback connection assumed for the margin calculation. By
default, marg,freq] = ncfmargin(P,C,sign)sign = -1. Set sign = +1 for
positive-feedback interconnection.
[
calculates the normalized coprime factor metric with the specified relative accuracy.marg,freq] = ncfmargin(___,tol)
Examples
Consider an unstable first-order plant, p, stabilized by high-gain and low-gain controllers, cL and cH.
p = tf(4,[1 -0.001]); cL = 1; cH = 10;
Compute the stability margin of the closed-loop system with the low-gain controller.
[margL,~] = ncfmargin(p,cL)
margL = 0.7069
Similarly, compute the stability margin of the closed-loop system with the high-gain controller.
[margH,~] = ncfmargin(p,cH)
margH = 0.0995
The closed-loop systems with low-gain and high-gain controllers have normalized coprime stability margins of about 0.71 and 0.1, respectively. This result indicates that the closed-loop system with low-gain controller is more robust to unstructured perturbations than the system with the high-gain controller.
To observe this difference in robustness, construct an uncertain plant, punc, that has additional unmodeled dynamics at high frequency compared to the nominal plant.
punc = p + ultidyn('uncstruc',[1 1],'Bound',1); sigma(p,punc,'r--')
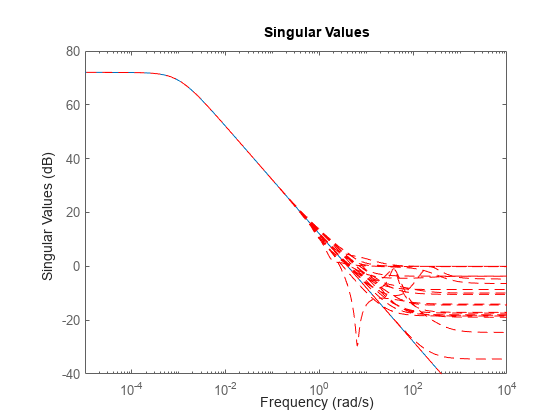
Calculate the robust stability of the closed-loop systems formed by the uncertain plant and each controller.
[stabmargL,~] = robstab(feedback(punc,cL))
stabmargL = struct with fields:
LowerBound: 0.9980
UpperBound: 1
CriticalFrequency: Inf
[stabmargH,~] = robstab(feedback(punc,cH))
stabmargH = struct with fields:
LowerBound: 0.0998
UpperBound: 0.1000
CriticalFrequency: Inf
As expected, the robust stability analysis shows that the closed-loop system with low-gain controller is more robustly stable in the presence of the unmodeled LTI dynamics. In fact, this closed-loop system can tolerate almost 100% of the specified uncertainty. In contrast, closed-loop system with the high-gain controller can tolerate only about 10% of the specified uncertainty.
Consider a plant and a stabilizing controller.
P1 = tf([1 2],[1 5 10]); C = tf(4.4,[1 0]);
Compute the stability margin for this plant and controller.
b1 = ncfmargin(P1,C)
b1 = 0.1961
Next, compute the gap between P1 and the perturbed plant, P2.
P2 = tf([1 1],[1 3 10]); [gap,nugap] = gapmetric(P1,P2)
gap = 0.1391
nugap = 0.1390
Because the stability margin b1 = b(P1,C) is greater than the gap between the two plants, C also stabilizes P2. As discussed in Gap Metrics and Stability Margins, the stability margin b2 = b(P2,C) satisfies the inequality asin(b(P2,C)) ≥ asin(b1)-asin(gap). Confirm this result.
b2 = ncfmargin(P2,C); [asin(b2) asin(b1)-asin(gap)]
ans = 1×2
0.0997 0.0579
Input Arguments
Plant, specified as a dynamic system model. P can be SISO or
MIMO, as long as P*C has the same number of inputs and outputs.
P can be continuous time or discrete time. If
P is a generalized state-space model (genss
or uss) then ncfmargin uses the current or
nominal value of all control design blocks in P.
Plant, specified as a dynamic system model. C can be SISO or
MIMO, as long as P*C has the same number of inputs and outputs.
C can be continuous time or discrete time. If
C is a generalized state-space model (genss
or uss) then ncfmargin uses the current or
nominal value of all control design blocks in P.
By default, ncfmargin assumes a negative-feedback
interconnection between P and C. To compute
the margins for a closed-loop system with positive feedback, use [marg,freq] =
ncfmargin(P,C,+1).
Sign of the feedback connection, specified as either -1 or
+1.
The default value, sign = -1, specifies negative feedback.
Setting sign = +1 assumes a positive feedback connection for the
margin calculation, as in the following diagram.
Relative accuracy for the computed margin, specified as a positive scalar value less than 1. The default value is 0.001, or 0.1% accuracy.
Output Arguments
More About
Tips
While
ncfmarginassumes a negative-feedback loop, thencfsyncommand designs a controller for a positive-feedback loop. Therefore, to compute the margin using a controller designed withncfsyn, use[marg,freq] = ncfmargin(P,C,+1).
Algorithms
The computation of the normalized coprime stability margin is as described in Chapter 16 of [1].
References
[1] Zhou, K., Doyle, J.C., Essentials of Robust Control. London, UK: Pearson, 1997.
Version History
Introduced before R2006a
See Also
ncfsyn | robstab | diskmargin | gapmetric | wcdiskmargin