bilin
Multivariable bilinear transform of frequency (s or z)
Syntax
GT = bilin(G,VERS,METHOD,AUG)
Description
bilin computes the effect on a system of the frequency-variable substitution,
The variable VERS denotes the transformation direction:
VERS= 1, forward transform (s→z) or .
VERS=-1, reverse transform (z→s) or .
This transformation maps lines and circles to circles and lines in the complex plane. People often use this transformation to do sampled-data control system design [1] or, in general, to do shifting of jω modes [2], [3], [4].
Bilin computes several state-space bilinear transformations such as backward rectangular, etc., based on the METHOD you select
Bilinear Transform Types
Method | Type of bilinear transform |
|---|---|
| backward rectangular:
|
| forward rectangular:
|
| shifted Tustin:
|
| shifted jω-axis, bilinear pole-shifting, continuous-time to continuous-time:
|
|
|
Examples
Consider the following continuous-time plant.
.
A = [-1 1; 0 -2]; B = [1 0; 1 1]; C = [1 0; 0 1]; D = [0 0; 0 0]; sys = ss(A,B,C,D);
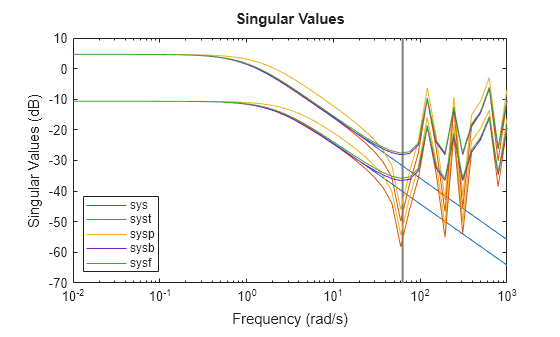
Discretize the plant at 20 Hz by several methods. Use c2d to compute the Tustin and pre-warped Tustin discretizations, and use bilin for the backward and forward rectangular discretizations.
Ts = 0.05; % sample time syst = c2d(sys,Ts,'tustin'); % Tustin sysp = c2d(sys,Ts,'prewarp',40); % Pre-warped Tustin sysb = bilin(sys,1,'BwdRec',Ts); % Backward Rectangular sysf = bilin(sys,1,'FwdRec',Ts); % Forward Rectangular
Plot the responses of the continuous-time plant and the transformed discrete-time plants.
w = logspace(-2,3,50); % frequencies to plot sigma(sys,syst,sysp,sysb,sysf,w); legend('sys','syst','sysp','sysb','sysf','Location','SouthWest')
Design an H mixed-sensitivity controller for a ACC Benchmark plant.
such that all closed-loop poles lie inside a circle in the left half of the s-plane whose diameter lies on between points [p1,p2]=[–12,–2]:
p1=-12; p2=-2; s=zpk('s');
G=ss(1/(s^2*(s^2+2))); % original unshifted plant
Gt=bilin(G,1,'Sft_jw',[p1 p2]); % bilinear pole shifted plant Gt
Kt=mixsyn(Gt,1,[],1); % bilinear pole shifted controller
K =bilin(Kt,-1,'Sft_jw',[p1 p2]); % final controller K
As shown in the following figure, closed-loop poles are placed in the left
circle [p1 p2]. The shifted plant, which has its
non-stable poles shifted to the inside the right circle, is
'S_ftjw' final
closed-loop poles are inside the left [p1,p2] circle
References
[1] Franklin, G.F., and J.D. Powell, Digital Control of Dynamics System, Addison-Wesley, 1980.
[2] Safonov, M.G., R.Y. Chiang, and H. Flashner, “H∞ Control Synthesis for a Large Space Structure,” AIAA J. Guidance, Control and Dynamics, 14, 3, p. 513-520, May/June 1991.
[3] Safonov, M.G., “Imaginary-Axis Zeros in Multivariable H∞ Optimal Control”, in R.F. Curtain (editor), Modelling, Robustness and Sensitivity Reduction in Control Systems, p. 71-81, Springer-Varlet, Berlin, 1987.
Version History
Introduced before R2006a