Model Interactions with Other Domains
Simscape™ Driveline™ comes with blocks built for the mechanical translational and mechanical rotational domains. However, these blocks can interact with physical networks in any Simscape domain. Each domain uses a distinct color for the connection lines. When blocks support connections to more than one domain, the block calculates the interactions between these domains. For example, the Simple Gear connects to the mechanical rotational domain, but the block can also output gear meshing losses to the thermal domain. Blocks like the Leadscrew, Rack & Pinion, and Slider-Crank block convert between the mechanical rotational and mechanical translational domains.
Model a Conversion from Rotational Motion to Translational Motion
In this example, you convert the rotational motion from the output of the Simple Gear block into oscillating translational motion, and you replace the Ideal Angular Velocity Source block with an electrical network to drive the system.
Open the model from the Build a Model and Visualize Results tutorial by entering:
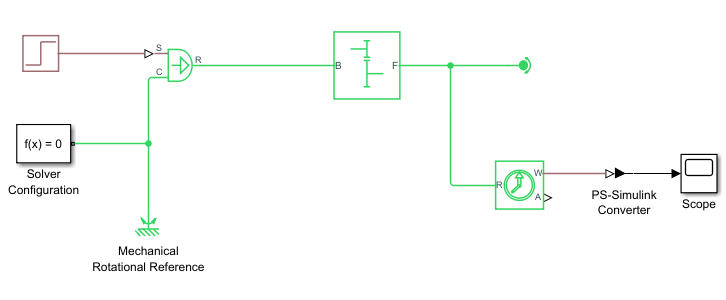
openExample('sdl/SimpleRotationalMechanicalSystemExample')The model uses a Simple Gear block to reduce the speed of a shaft where all interactions are ideal, and the system has no mass. The Scope block shows the reduced response of the output shaft to the step input after you run the model.
To convert from rotational motion to translational motion,
Replace the Rotational Free End block with a Slider-Crank block.
Add a Translational Free End block and connect it to port S of the Slider-Crank block.
Use the existing Scope block and an Ideal Translational Motion Sensor block to track the conversion from rotational energy to translational energy.
From the Simulation tab, in the Prepare section, click Property Inspector. Then, select the Scope block and set Number of input ports to
2.Add an Ideal Translational Motion Sensor block to the canvas and set Measurement reference to
Absolute.Connect port R between the Slider-Crank block and the Rotational Free End block.
Add a PS-Simulink Converter block and connect it between port V of the Slider-Crank block and the Scope block.
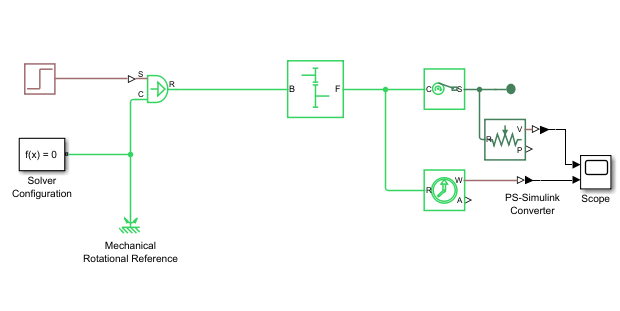
Open the Scope block and select View > Layout, and select two vertically stacked cells. Run the model and observe the oscillating translational step response and the constant rotational step response. If the results are not visible, click the Scale Y-Axis Limits button.
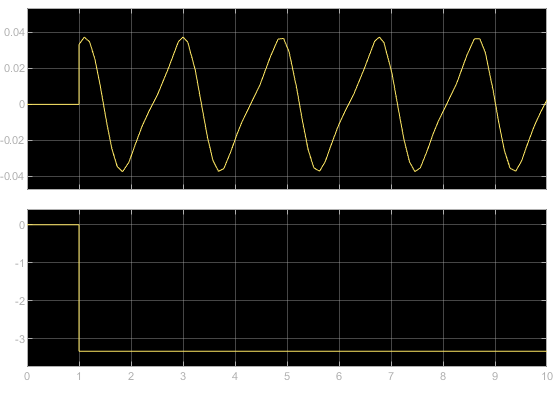
The top plot shows the translational velocity of the slider portion of the Slider-Crank block. The bottom plot shows the rotational motion. The rotational constant velocity generates oscillating translational velocity.
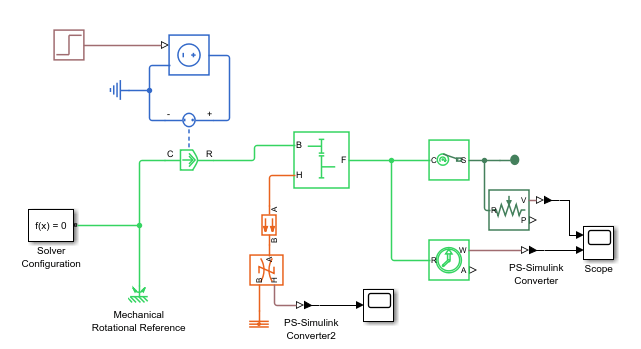
Model Power System Interactions with the Electrical Domain
To capture the mechanical system interaction with an electrical power supply, connect the network to the electrical domain. To represent a lossless system:
Replace the Ideal Angular Velocity Source block with a Rotational Electromechanical Converter block
Set Constant of proportionality K to
1
You must connect the Rotational Electromechanical Converter to a complete electrical circuit.
Add a Controlled Voltage Source block and reconnect the PS Step block to the physical signal port of the Controlled Voltage Source block.
Connect the Rotational Electromechanical Converter block + and - ports to the Controlled Voltage Source + and - ports, respectively.
Add an Electrical Reference block to ground the electrical circuit.
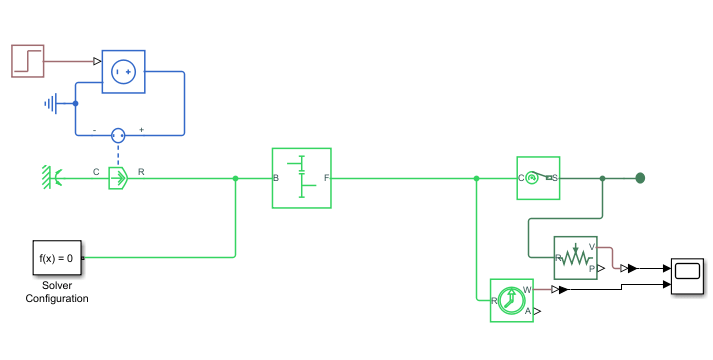
Confirm that the results in the Scope block are the same as before.
Model Heat Flow with the Thermal Domain
The Simple Gear block interfaces with the
thermal domain when you set Friction model to
Temperature-dependent efficiency or
Temperature and load-dependent efficiency.
Set the Friction model parameter to
Temperature-dependent efficiencyto enable port H, which connects to the thermal domain.Add these blocks to the canvas:
Conductive Heat Transfer
Heat Flow Rate Sensor
Thermal Reference
PS-Simulink Converter
Scope
Connect port A of the Conductive Heat Transfer block to port H of the Simple Gear block.
Connect port B to port A of the Heat Flow Rate Sensor block.
Connect port B of the Heat Flow Rate Sensor block to the Thermal Reference block
Connect port H to the PS-Simulink Converter and Scope blocks.
Open the new Scope block and run the model.
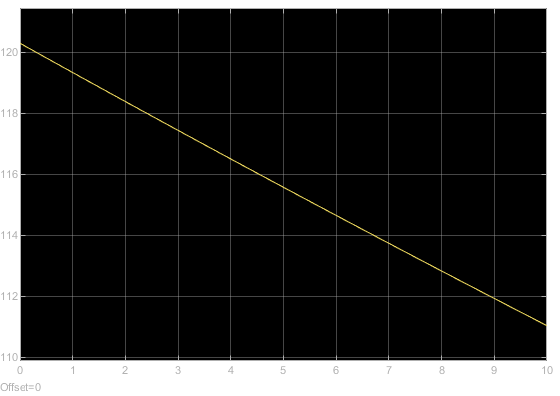
The Simple Gear block computes the meshing losses from the gear tooth interaction and outputs them to the thermal domain. The positive values indicate heat flow away from the block with a decreasing flow rate.
See Also
Domain-Specific Line Styles | Model Thermal Losses in Driveline Components