tfestimate
Transfer function estimate
Syntax
Description
txy = tfestimate(x,y)x and the output signal y
evaluated at a set of frequencies.
If
xandyare both vectors, they must have the same length.If one of the signals is a matrix and the other is a vector, then the length of the vector must equal the number of rows in the matrix. The function expands the vector and returns a matrix of column-by-column transfer function estimates.
If
xandyare matrices with the same number of rows but different numbers of columns, thentxyis a multi-input/multi-output (MIMO) transfer function that combines all input and output signals.txyis a three-dimensional array. Ifxhas m columns andyhas n columns, thentxyhas n columns and m pages. See Transfer Function for more information.If
xandyare matrices of equal size, thentfestimateoperates column-wise:txy(:,n) = tfestimate(x(:,n),y(:,n)). To obtain a MIMO estimate, append"mimo"to the argument list.
txy = tfestimate(___,"mimo")
[
returns a vector of frequencies, txy,f] = tfestimate(___,Fs)f, expressed in terms of
the sample rate, Fs, at which the transfer function is
estimated. Fs must be the sixth numeric input to
tfestimate. To input a sample rate and still use the
default values of the preceding optional arguments, specify these arguments as
empty [].
[___] = tfestimate(___,
specifies additional options using name-value arguments. Options include the
transfer function estimator and the target parent container on which to plot the
transfer function estimate. You can add these arguments to any of the previous
input syntaxes.Name=Value)
tfestimate(___) with no
output arguments plots the transfer function estimate in the current figure
window.
Examples
Compute and plot the transfer function estimate between two sequences, x and y. The sequence x consists of white Gaussian noise. y results from filtering x with a 30th-order lowpass filter with normalized cutoff frequency rad/sample. Use a rectangular window to design the filter. Specify a sample rate of 500 Hz and a Hamming window of length 1024 for the transfer function estimate.
h = fir1(30,0.2,rectwin(31)); x = randn(16384,1); y = filter(h,1,x); fs = 500; tfestimate(x,y,1024,[],[],fs)
Verify that the transfer function approximates the frequency response of the filter.
freqz(h,1,[],fs)
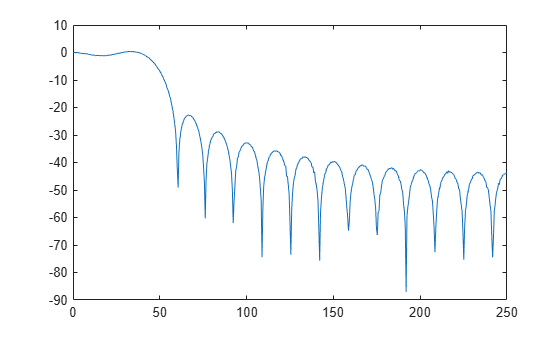
Obtain the same result by returning the transfer function estimate in a variable and plotting its absolute value in decibels.
[Txy,f] = tfestimate(x,y,1024,[],[],fs); plot(f,mag2db(abs(Txy)))
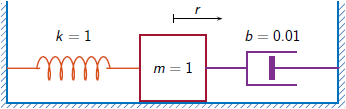
Estimate the transfer function for a simple single-input/single-output system and compare it to the definition.
A one-dimensional discrete-time oscillating system consists of a unit mass, (in kg), attached to a wall by a spring of unit elastic constant. A sensor samples the acceleration, , of the mass at Hz. A damper impedes the motion of the mass by exerting on it a force proportional to speed, with damping constant kg/s.
Generate 2000 time samples. Define the sampling interval .
Fs = 1; dt = 1/Fs; N = 2000; t = dt*(0:N-1); b = 0.01;
The system can be described by the state-space model
where is the state vector, and are respectively the position and velocity of the mass, is the driving force, and is the measured output. The state-space matrices are
is the identity, and the continuous-time state-space matrices are
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(size(A)))*Bc; C = [-1 -b]; D = 1;
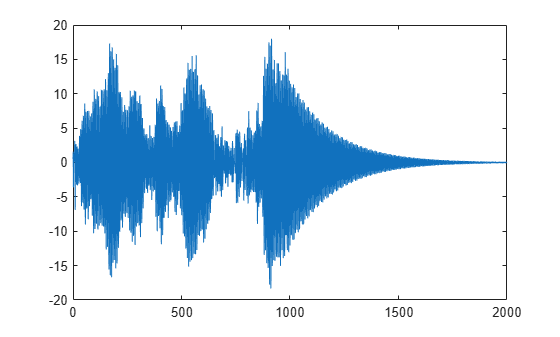
The mass is driven by random input for half of the measurement interval. Use the state-space model to compute the time evolution of the system starting from an all-zero initial state. Plot the acceleration of the mass as a function of time.
rng("default") u = zeros(1,N); u(1:N/2) = randn(1,N/2); y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)
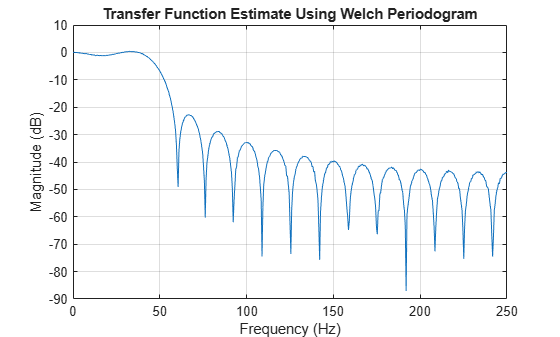
Estimate the transfer function of the system as a function of frequency. Use 2048 DFT points and specify a Kaiser window with a shape factor of 15. Use the default value of overlap between adjoining segments.
nfs = 2048; wind = kaiser(N,15); [txy,ft] = tfestimate(u,y,wind,[],nfs,Fs);
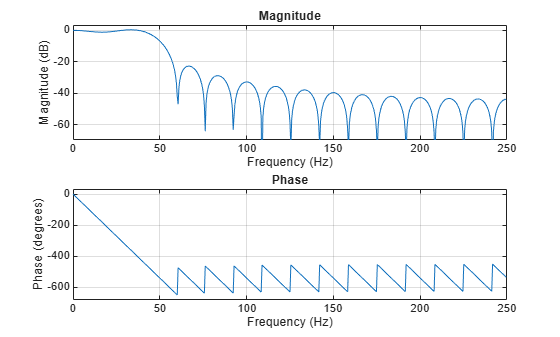
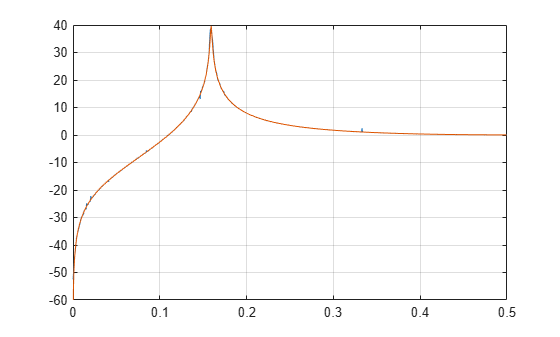
The frequency-response function of a discrete-time system can be expressed as the Z-transform of the time-domain transfer function of the system, evaluated at the unit circle. Verify that the estimate computed by tfestimate coincides with this definition.
[b,a] = ss2tf(A,B,C,D); fz = 0:1/nfs:1/2-1/nfs; z = exp(2j*pi*fz); frf = polyval(b,z)./polyval(a,z); plot(ft,mag2db(abs(txy))) hold on plot(fz,mag2db(abs(frf))) hold off grid ylim([-60 40])
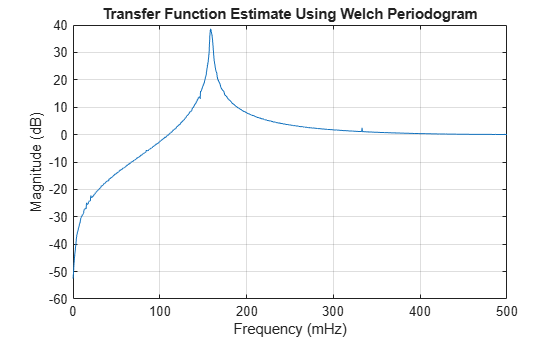
Plot the estimate using the built-in functionality of tfestimate.
tfestimate(u,y,wind,[],nfs,Fs)
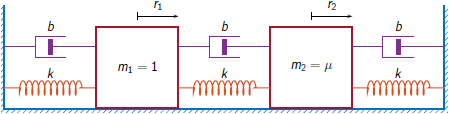
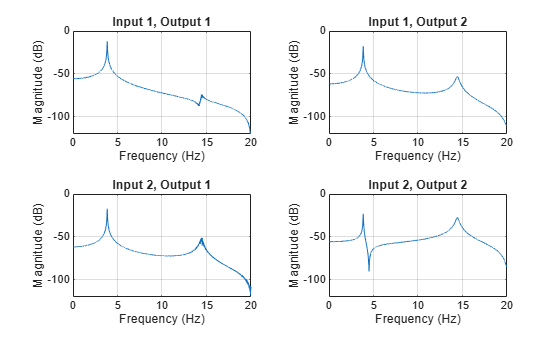
Estimate the transfer function for a multi-input/multi-output (MIMO) system.
Two masses connected to a spring and a damper on each side form an ideal one-dimensional discrete-time oscillating system. The system input array u consists of random driving forces applied to the masses. The system output array y contains the observed displacements of the masses from their initial reference positions. The system is sampled at a rate Fs of 40 Hz.
Load the data file containing the MIMO system inputs, the system outputs, and the sample rate. The example Frequency-Response Analysis of MIMO System analyzes the system that generated the data used in this example.
load MIMOdata Fs u y
Estimate and plot the frequency-domain transfer functions of the system using the system data and the function tfestimate. Divide the signal into 5000-sample segments with 50% overlap between adjoining segments. Apply a Hanning window to each segment and calculate the discrete Fourier transform of the signal segment using 8192 frequency points. Select the "mimo" option to produce all four transfer functions.
g = hann(5000); nfft = 8192; ol = 2500; [tXY,ft] = tfestimate(u,y,g,ol,nfft,Fs,"mimo"); tiledlayout flow for jk = 1:2 for kj = 1:2 nexttile plot(ft,mag2db(abs(tXY(:,jk,kj)))) grid on ylim([-120 0]) title("Input "+jk+", Output "+kj) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") end end
Create a UI figure window and add an axes and a panel container.
uif = uifigure(Position=[100 100 720 540]); ax = uiaxes(uif,Position=[5 280 450 240]); p = uipanel(uif,Position=[180 5 520 270], ... Title="Transfer-Function Estimate in Panel Container", ... BackgroundColor="white");
Plot the four transfer-function estimates of the system in the axes and plot each input-output pair of the system in the panel container. (Since R2026a)
tfestimate(u,y,g,ol,nfft,Fs,"mimo",Parent=ax) legend(ax,"Input "+[1 2]+", Output "+[1 2]',Location="best") tfestimate(u,y,g,ol,nfft,Fs,Parent=p)

Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
tfestimate uses Welch's averaged periodogram
method. See pwelch for details.
References
[1] Vold, Håvard, John Crowley, and G. Thomas Rocklin. “New Ways of Estimating Frequency Response Functions.” Sound and Vibration. Vol. 18, November 1984, pp. 34–38.