Ideal Rotational Motion Sensor
Motion sensor in mechanical rotational systems

Libraries:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
Description
The Ideal Rotational Motion Sensor block represents an ideal mechanical rotational motion sensor, that is, a device that converts an across variable measured between two mechanical rotational nodes into a control signal proportional to acceleration, angular velocity, or position (angle). You can specify the initial angular position (offset) as a block parameter.
The sensor is ideal since it does not account for inertia, friction, delays, energy consumption, and so on.
Connections R and C are mechanical rotational conserving ports that connect the block to the nodes where motion is being monitored. The block positive direction is from port R to port C. This means that the velocity is measured as ω = ωR – ωC, where ωR, ωC are the absolute angular velocities at ports R and C, respectively. The Measurement reference parameter lets you disable port C and measure with respect to ground.
Connections α, W, and A are physical signal output ports for angular acceleration, velocity, and displacement, respectively. The visibility of these ports is controlled by block parameters. If you enable port α, the block performs additional computations, to measure acceleration based on velocity. To avoid unnecessary model complexity, it is recommended that in each instance of the block you enable only the ports that you actually use for measurement.
The Wrap angle to [0, 2*pi] check box lets you control the angular displacement output range. When selected, it keeps angular displacement within the range from 0 to 2π radians (360 degrees), regardless of the number of revolutions performed by the object and the direction of rotation. When this check box is cleared, the output range is unrestricted.
The figure demonstrates the difference between the two options.
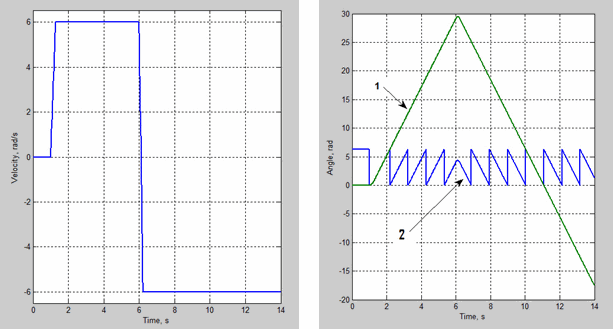
In this example, the object is moving at 6 rad/s in the positive direction for the first 5 seconds, and then switches to the negative direction at the same speed. The default angular displacement output (line 1) shows that the object turned forward by 30 rad and then turned back in the negative direction, continuing until –20 rad. If you select the Wrap angle to [0, 2*pi] check box, the output (line 2) stays in the range from 0 to 2π rad.
Selecting the Wrap angle to [0, 2*pi] check box simplifies development of models with complex relationship between model parameters and rotation angle, such as pumps and motors.
Examples

Permanent Magnet DC Motor
Verify manufacturer specifications of no-load speed, no-load current, and stall torque for a DC motor by using a test harness and Simscape™ blocks.
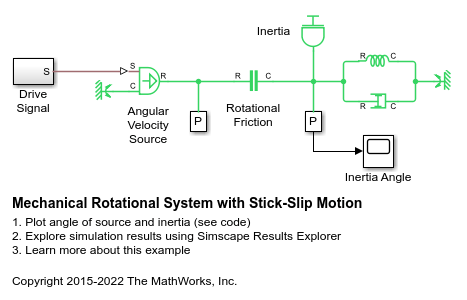
Mechanical Rotational System with Stick-Slip Motion
A mechanical rotational system with stick-slip friction. An inertia is connected to a fixed point by spring and damper. The inertia is driven by a velocity source via a stick-slip friction element. The friction element has a difference between the breakaway and the Coulomb frictions, resulting in stick-slip motion of the inertia.