CAN
Comunicazione utilizzando il protocollo CAN
Controller Area Network (CAN) è un protocollo di comunicazione robusto che abilita la comunicazione tra più dispositivi. È possibile sfruttare le capacità del CAN per progettare e implementare in modo efficiente sistemi di comunicazione basati su CAN robusti e affidabili.
Blocchi
| CAN Transmit | Transmit message to CAN network |
| CAN Receive | Receive message from CAN network |
| On-board CAN Receive | Receive messages using on-board Arduino CAN controller (Da R2024b) |
| On-board CAN Transmit | Transmit messages to CAN network using on-board Arduino CAN controller (Da R2024b) |
| Hardware Interrupt SAM | Trigger downstream function-call subsystems from interrupt service routine for Arduino SAM core (Da R2024b) |
| Hardware Interrupt Teensy4 | Trigger downstream function-call subsystems from interrupt service routine for Teensy 4.0 and 4.1 Arduino compatible boards (Da R2024b) |
Impostazioni modello
Esempi in primo piano
Transmit and Receive Data Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to transmit and receive data from the CAN network using the specified CAN device.
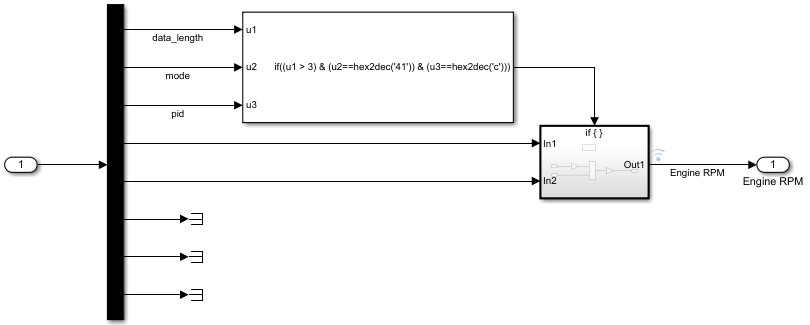
Monitor Engine RPM Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to monitor vehicle engine RPM using Arduino CAN blocks.