Enable
Add enable port to subsystem or model
Libraries:
Simulink /
Ports & Subsystems
HDL Coder /
Ports & Subsystems
Description
The Enable block allows an external signal to control execution of a subsystem or a model. To enable this functionality, add the block to a Subsystem block or at the root level of a model that is referenced by a Model block.
If you use an enable port at the root-level of a model:
For multi-rate models, set the solver to single-tasking.
For models with a fixed-step size, at least one block in the model must run at the specified fixed-step size rate.
Examples

Implement Control Algorithm Using Enabled Subsystem
Use an enabled subsystems to implement a control algorithm based on a binary logic signal. The enabled subsystems execute when the binary signal has a positive value and implements the control algorithm. In this example, the super-twisting control algorithm is used to stabilize an unstable dynamic system. The super-twisting algorithm is one of the well known sliding mode control techniques for its robust performance.

Control Block States and Output of Enabled Subsystem
Reset or hold states of blocks inside an Enabled Subsystem block when the subsystem is disabled and how to control the subsystem output. In this example, you see four different combinations of state and output value configurations for both discrete and continuous control signals. When the enabled subsystem is disabled, the combinations work as follows:
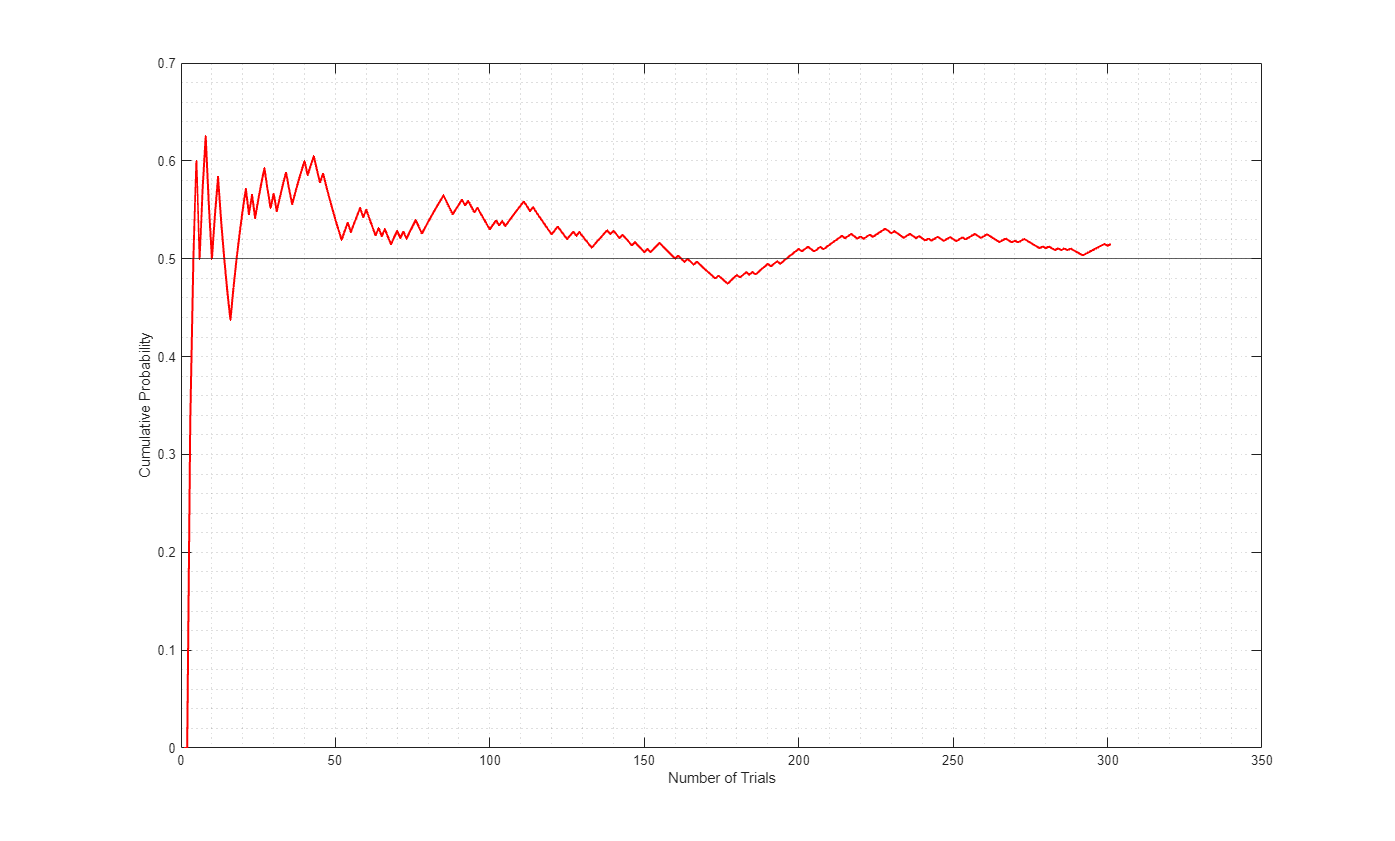
Exploring Law of Large Numbers using MATLAB System Block
Use MATLAB System blocks to illustrate the law of large numbers in Simulink.

Counters Using Conditionally Executed Subsystems
Implement counters using Enabled and Triggered subsystems. In this example, the model sldemo_counters controls flow of water into a tank and uses a counter to count the number of times overflow occurs, where overflow occurs when the water level in the tank is 8 meters or more for 30 seconds or more.

Building a Clutch Lock-Up Model
Use Simulink® to model and simulate a rotating clutch system. Although modeling a clutch system is difficult because of topological changes in the system dynamics during lockup, this example shows how enabled subsystem can easily handle such problems. We illustrate how to employ important Simulink modeling concepts in the creation of the clutch simulation. Designers can apply these concepts to many models with strong discontinuities and constraints that may change dynamically.
Ports
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a