Simulink.connectBlocks
Syntax
Description
connection = Simulink.connectBlocks(src,dst)src to the destination specified by
dst with signal lines. The source and destination can be on different
levels of the model hierarchy. When you programmatically connect blocks inside a
Variant Subsystem block, the connection is only made in the active
variant.
When the model is open, you can undo the connection by pressing Ctrl+Z (on macOS, press command+Z).
connection = Simulink.connectBlocks(src,dst,RoutingStyle=Value)RoutingStyle.
Examples
Input Arguments
Source of the signal line you want to create, specified as a block or output port using a handle or path. If the specified destination is a block, the specified source must be a block. If the specified destination is a port, the specified source must be a port. If you specify the source and destination as blocks, the function connects an unconnected port on the source block to an unconnected port on the destination block. If the source you specify (block or port) is fully connected, the function branches one of the signal lines connected to the source.
For information about how to get the handle or path of a block or port, see Get Handles and Paths. Specify block and
port handles as scalars. Specify block and port paths as strings or character vectors.
Typically, the port path is the block path followed by a slash and the port number, for
example, "myModel/mysubSystem/myBlock/1". Using a port path to
specify a subsystem port whose name has been changed from the default port number is not
supported. Use a handle instead.
If the source is the state port of an Integrator block, the port path
ends with the port name State instead of a port number, for example,
"myModel/mysubSystem/myBlock/State".

To connect to a state port, the state port must be visible. By default, the state
port on the Integrator block is hidden. To make the port visible, run
this command, where path is the block path of the
Integrator block.
set_param(path,ShowStatePort="on")Example: "myModel/myBlock"
Example: "myModel/mysubSystem/myBlock/1"
Destination of the signal line you want to create, specified as a block or input port using a handle or path. If the specified source is a block, the specified destination must be a block. If the specified source is a port, the specified destination must be a port. If you specify the source and destination as blocks, the function connects an unconnected port on the source block to an unconnected port on the destination block. If the specified destination is a block, the block must have at least one unconnected port. If the specified destination is a port, the port must be unconnected.
For information about how to get the handle or path of a block or port, see Get Handles and Paths. Specify block and
port handles as scalars. Specify block and port paths as strings or character vectors.
Typically, the port path is the block path followed by a slash and the port number, for
example, "myModel/mysubSystem/myBlock/1". Using a port path to
specify a subsystem port whose name has been changed from the default port number is not
supported. Use a handle instead.
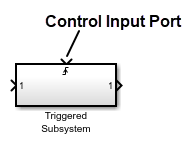
If the destination is the control input port of a conditionally executed subsystem,
the port path ends with the port name of the port instead of a port number, for example,
"myModel/mysubSystem/myBlock/Trigger". The table lists the port
names of the control input ports of conditionally executed subsystems.
| Conditionally Executed Subsystem | Port Name |
|---|---|
| Triggered | Trigger |
| Enabled | Enable |
| Enabled and Triggered |
|
| Resettable | Reset |
| If Action | Ifaction |
| Switch Case Action | Ifaction |
| Function-Call | Trigger |
| Message Polling | Trigger |
| Message Triggered | Trigger |
The initial condition (IC) port of a While Iterator block has a port number, but the port number is not visible on the block. By default, the port number is 2.
Example: "myModel/myBlock"
Example: "myModel/mysubSystem/myBlock/1"
Example: "myModel/mysubSystem/myBlock/Trigger"
Style of signal line layout, specified as
Simulink.Connection.RoutingStyle.Orthogonal or
Simulink.Connection.RoutingStyle.Direct. By default, the
Simulink.connectBlocks function uses smart automatic line
routing. The signal lines the function creates are composed exclusively of orthogonal
line segments and avoid overlapping other blocks and signal lines.
To turn smart automatic line routing off and create signal lines that connect blocks
using the most direct route without avoiding overlap, specify the input argument
RoutingStyle with the value
Simulink.Connection.RoutingStyle.Direct.
To turn smart automatic line routing on, specify the input argument
RoutingStyle with the value
Simulink.Connection.RoutingStyle.Orthogonal.
Example: RoutingStyle=Simulink.Connection.RoutingStyle.Direct
Output Arguments
Version History
Introduced in R2024bStarting in R2025a, you can get a block or port path from the context menu. Right-click the block or port, and then click the Copy Path button
![]() . When you paste the path into a command, remember to add quotes to convert the path into a string or a character vector. For more information about getting and using paths, see Get Handles and Paths.
. When you paste the path into a command, remember to add quotes to convert the path into a string or a character vector. For more information about getting and using paths, see Get Handles and Paths.