Tune PID Controller Within Model Reference
In Simulink®, you can include one model inside another using model referencing (see Model Reference Behavior and Capabilities). When using PID Tuner or Frequency Response Based PID Tuner to tune a PID controller block in a referenced model, there are some constraints to be aware of.
In general, you can tune a PID controller block in a referenced model using either PID Tuner or Frequency Response Based PID Tuner. When you open either tuner, the software prompts you to specify which model to use as the top-level model for linearization and tuning (PID Tuner) or estimation and tuning (Frequency Response Based PID Tuner). For example, consider the model model_ref_pid.
open_system("model_ref_pid")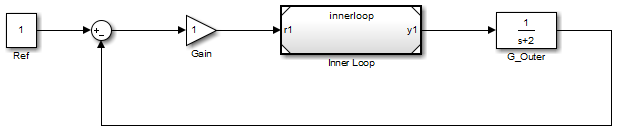
The Inner Loop system is a referenced model that contains the controller block to tune. Open the referenced model.
open_system("model_ref_pid/Inner Loop")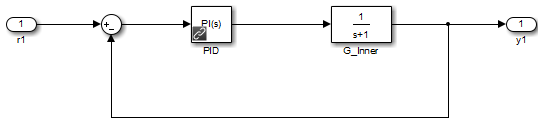
The Inner Loop model contains a PID controller block, PID. Open that block. In the Select Tuning Method drop-down list, select Transfer Function Based (PID Tuner App), and click Tune to open PID Tuner. The software prompts you to select which open model is the top-level model for linearization and tuning. (Selecting Frequency Response Based to open Frequency Response Based PID Tuner results in a similar prompt.)
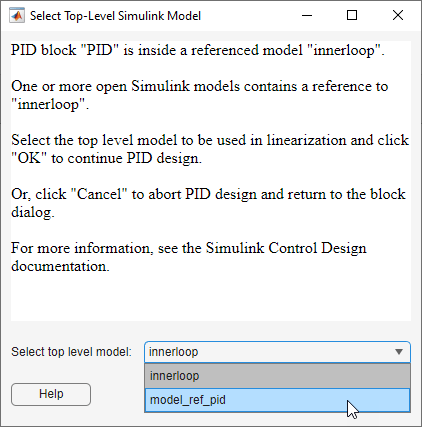
The available choices for top-level model include the referenced model itself plus any open model in which the referenced model:
Appears exactly once, and
Is configured for normal simulation mode.
The tuning tools do not detect models that contain the model reference but are not open.
Selecting innerloop causes the tuner to disregard model_ref_pid. Instead, the tuner tunes the PID Controller block for the plant G_Inner alone, as if there were no outer loop.
Alternatively, you can select model_ref_pid as the top-level model. When you do so, the tuner considers the dynamics of both the inner and outer loops and tunes with both loops closed. In this case, the PID controller sees the effective plant (1+G_Outer*Gain)*G_Inner.
Select the desired top-level model, and click OK. The tuner you selected with the Select Tuning Method opens for tuning the specified top-level model.
Models with Multiple Instances of the Referenced Model
Sometimes, tuning can proceed when the referenced model appears multiple times in an open model. If the following conditions are met, you can tune the PID controller block using the referenced model as the top-level model:
The only open models that contain the model reference have multiple instances of it, and
At least one of these instances is in normal mode.
When this condition occurs, the software issues a warning. In this case, because the tuner can only tune with respect to the referenced model, you cannot specify a top-level model.
Referenced Model in Accelerated or Other Simulation Modes
If there is no normal mode instance of the referenced model in any open model, tuning cannot proceed. In this case, the software issues an error. To tune the PID controller block, convert at least one instance of the referenced model in an open model to normal simulation mode.