Sistemi di coordinate
È possibile specificare le posizioni nelle immagini utilizzando vari sistemi di coordinate. I sistemi di coordinate sono utilizzati per posizionare gli elementi in relazione l’uno con l’altro. Le coordinate in pixel e i sistemi di coordinate spaziali si riferiscono a posizioni in un’immagine. Le coordinate in sistemi di coordinate in 3D descrivono il posizionamento in 3D e l’origine del sistema.
Indici dei pixel
Le coordinate in pixel consentono di specificare le posizioni nelle immagini. Nel sistema di coordinate in pixel, l’immagine è trattata come una griglia di elementi discreti, ordinati dall’alto verso il basso e da sinistra verso destra.
![]()
Nelle coordinate in pixel, il numero di righe r scende mentre il numero di colonne c aumenta a destra. Le coordinate in pixel sono valori interi che vanno da 1 alla lunghezza della riga o della colonna. Le coordinate in pixel utilizzate nel software Computer Vision Toolbox™ sono su base singola, coerenti con le coordinate utilizzate da Image Processing Toolbox™ e MATLAB®. Per ulteriori informazioni sui sistemi di coordinate in pixel, vedere Pixel Indices.
Coordinate spaziali
Le coordinate spaziali consentono di specificare una posizione in un’immagine con una granularità maggiore rispetto alle coordinate in pixel, in quanto nel sistema di coordinate in pixel, un pixel è trattato come un’unità discreta, identificata in modo univoco da una coppia intera riga e colonna, come (3,4). Nel sistema di coordinate spaziali, le posizioni in un’immagine sono rappresentate in termini di pixel parziali, come (3,3; 4,7).

Per ulteriori informazioni sul sistema di coordinate spaziali, vedere Spatial Coordinates.
Sistemi di coordinate in 3D
Quando si costruisce una scena in 3D, è possibile definire i punti 3D risultanti in uno dei due sistemi di coordinate. In un sistema di coordinate basato su fotocamera, i punti sono definiti rispetto al centro della fotocamera. In un sistema di coordinate basato su uno schema di calibrazione, i punti sono definiti rispetto a un punto nella scena.
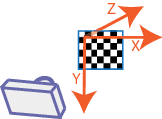
Le funzioni Computer Vision Toolbox utilizzano il sistema di coordinate universale destrorso. In questo sistema, l’asse x punta verso destra, l’asse y punta verso il basso e l’asse z punta lontano dalla fotocamera. Per visualizzare i punti 3D, utilizzare pcshow.
Sistema di coordinate basato su fotocamera
I punti rappresentati in un sistema di coordinate basato su fotocamera sono descritti con l’origine situata nel centro della fotocamera.

In un sistema stereo, l’origine è situata nel centro ottico della fotocamera 1.

Quando si costruisce una scena 3D utilizzando una fotocamera stereo calibrata, le funzioni reconstructScene e triangulate restituiscono punti 3D con l’origine posta nel centro ottico della fotocamera 1. Quando si utilizzano le immagini Kinect®, la funzione pcfromkinect restituisce punti 3D con l’origine posta nel centro della fotocamera RGB.
Sistema di coordinate basato su uno schema di calibrazione
I punti rappresentati in un sistema di coordinate basato su uno schema di calibrazione sono descritti con l’origine situata nella posizione (0,0) del modello di calibrazione.
Quando si costruisce una scena 3D da viste multiple contenenti uno schema di calibrazione, i punti 3D risultanti sono definiti nel sistema di coordinate basato sullo schema. L’esempio Structure from Motion from Two Views mostra come ricostruire una scena 3D da una coppia di immagini 2D contenenti uno schema a scacchiera.