caliper
Description
Add-On Required: This feature requires the Automated Visual Inspection Library for Computer Vision Toolbox add-on.
measurementData = caliper(I,linePosition)I, using a caliper
tool by positioning a profile scan line at the position
linePosition.
Note
This functionality requires the Automated Visual Inspection Library for Computer Vision Toolbox™. You can install the Automated Visual Inspection Library for Computer Vision Toolbox from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
measurementData = caliper(I,linePosition,Name=Value)Width=10 specifies the width of the profile scan as 10 pixels.
Examples
Load an image into the workspace.
I = imread("coins.png");Display the image using the imageshow function.
imageshow(I)
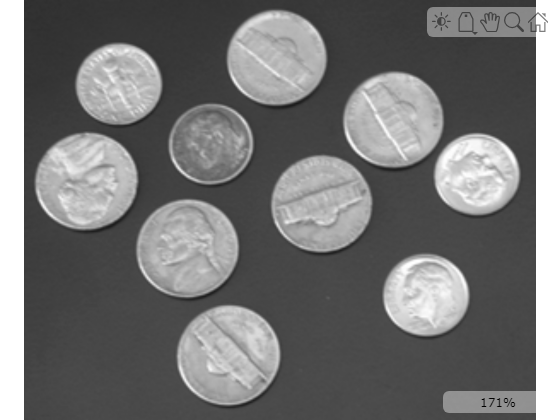
Measure the distance between the edges of the darkest nickel coin using the caliper function. Specify the start and end point of the profile scan line as [171 89; 218 131]. To detect the coin edges, specify a gradient threshold lower than the maximum intensity gradient across the scan length using the GradientThreshold name-value argument. Since the coin contains two edge pairs, the function returns the distance between them, or the coin width, as IntraEdgeDistance value.
measureOut = caliper(I,[158 89; 218 131],GradientThreshold=0.04)
measureOut = struct with fields:
InterEdgeDistance: [1×0 double]
IntraEdgeDistance: 56.4544
GradientValue: [0.0520 -0.0579]
Distance: [3.4186 59.8729]
ProfileData: [146×1 double]
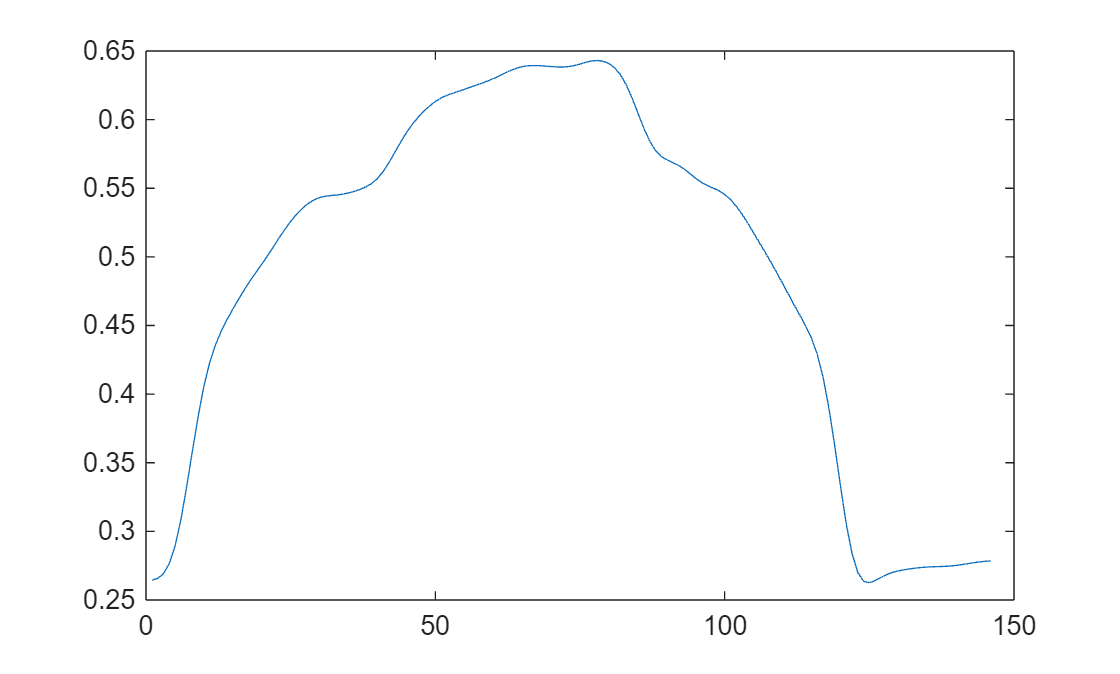
Display the intensity gradient value along the profile scan line.
figure plot(measureOut.ProfileData)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2025a
See Also
uicaliper | affinetform2d | imref2d | rigidtform2d | simtform2d | transltform2d