Corner Detection
Calculate corner metric matrix and find corners in images
Libraries:
Computer Vision Toolbox /
Analysis & Enhancement
Description
The Corner Detection block finds corners in an image by using the Harris corner detection (by Harris and Stephens), minimum eigenvalue (by Shi and Tomasi), or local intensity comparison (based on the Accelerated Segment Test, (FAST) method by Rosten and Drummond) method. The block finds the corners in the image based on the pixels that have the largest corner metric values.
Examples
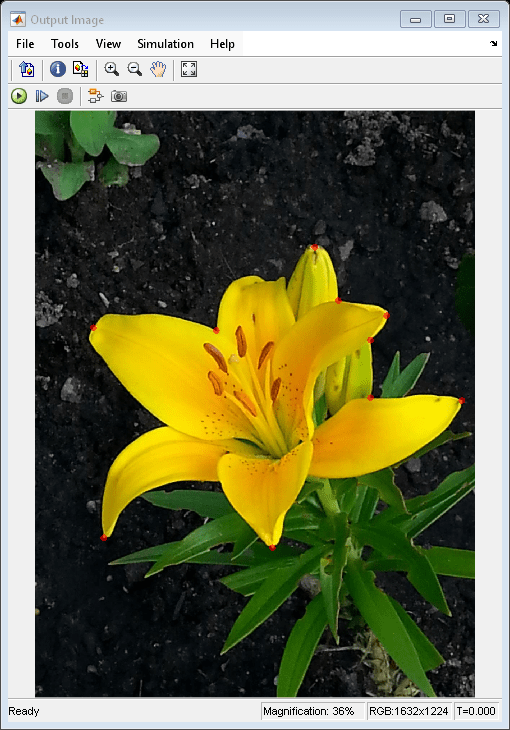
Detect Corners in Image
Detect corners in an image using the Corner Detection block.
Ports
Input
Output
Parameters
Block Characteristics
More About
These diagrams show the data types used in the Corner Detection block for fixed-point signals. These diagrams apply to the Harris corner detection and minimum eigenvalue methods only.


The following table summarizes the variables used in the previous diagrams.
| Variable Name | Definition |
|---|---|
| IN_DT | Input data type |
| MEM_DT | Memory data type |
| OUT_DT | Metric output data type |
| COEF_DT | Coefficients data type |
Algorithms
The method determines that a pixel is a possible corner if it has either, N contiguous valid bright surrounding pixels, or N contiguous dark surrounding pixels.
Suppose that p is the pixel under consideration and j is one of the pixels surrounding p. The locations of the other surrounding pixels are denoted by the shaded areas in the following figure. The shaded areas in this figure denote the locations of other surrounding pixels.

and are the intensities of pixels p and j, respectively. Pixel j is a valid bright surrounding pixel if . Similarly, pixel j is a valid dark surrounding pixel if . In these equations, T is the value you specified for the Intensity comparison threshold parameter.
The block repeats this process to determine whether the block has N contiguous valid surrounding pixels. The value of N is related to the value you specify for the Maximum angle to be considered a corner (in degrees) parameter, as shown in this table.
Number of Valid Surrounding Pixels and Angle
| Number of Valid Surrounding Pixels | Angle (degrees) |
|---|---|
| 15 | 22.5 |
| 14 | 45 |
| 13 | 67.5 |
| 12 | 90 |
| 11 | 112.5 |
| 10 | 135 |
| 9 | 157.5 |
After the block determines that a pixel is a possible corner, it computes its corner metric using the following equation:
References
[1] Harris, C. and M Stephens. “A Combined Corner and Edge Detector.” Proceedings of the 4th Alvey Vision Conference, 147-151. August 1988.
[2] Shi, J. and C. Tomasi. “Good Features to Track.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 593-600. June 1994.
[3] Rosten, E. and T. Drummond. “Fusing Points and Lines for High Performance Tracking.” Proceedings of the IEEE International Conference on Computer Vision Vol. 2, 1508-1511. October 2005.
Extended Capabilities
Version History
Introduced in R2007b