Airframe Trim and Linearize with Simulink Control Design
This example shows how to trim and linearize an airframe using Simulink® Control Design™ software.
Designing an autopilot with classical design techniques requires linear models of the airframe pitch dynamics for several trimmed flight conditions. The MATLAB® technical computing environment can determine the trim conditions and derive linear state-space models directly from the nonlinear Simulink® and Aerospace Blockset™ model. This step saves time and helps to validate the model. The Simulink Control Design functions allow you to visualize the motion of the airframe in terms of open-loop frequency or time responses.
Initialize Guidance Model
The first problem is to find the elevator deflection, and the resulting trimmed body rate (q), which will generate a given incidence value when the missile is traveling at a set speed. Once the trim condition is found, a linear model can be derived for the dynamics of the perturbations in the states around the trim condition.
open_system('aeroblk_guidance_airframe');

Define State Values
Define the state values for trimming:
Height [m]
Mach Number
Incidence [rad]
Flightpath Angle [rad]
Total Velocity [m/s]
Initial Pitch Body Rate [rad/sec]
heightIC = 10000/m2ft; machIC = 3; alphaIC = -10*d2r; thetaIC = 0*d2r; velocityIC = machIC*(340+(295-340)*heightIC/11000); pitchRateIC = 0;
Set Operating Point and State Specifications
The first state specifications are Position states. The second state specification is Theta. Both are known, but not at steady state. The third state specifications are body axis angular rates, of which the variable w is at steady state.
opspec = operspec('aeroblk_guidance_airframe');
opspec.States(1).Known = [1;1];
opspec.States(1).SteadyState = [0;0];
opspec.States(2).Known = 1;
opspec.States(2).SteadyState = 0;
opspec.States(3).Known = [1 1];
opspec.States(3).SteadyState = [0 1];
Search for Operating Point, Set I/O, Then Linearize
Find the operating point that meets the state specification and then derive the linear model using the specified input and outputs.
op = findop('aeroblk_guidance_airframe',opspec); io(1) = linio('aeroblk_guidance_airframe/Fin Deflection',1,'input'); io(2) = linio('aeroblk_guidance_airframe/Selector',1,'output'); io(3) = linio(sprintf(['aeroblk_guidance_airframe/Aerodynamics &\n', ... 'Equations of Motion']),3,'output'); sys = linearize('aeroblk_guidance_airframe',op,io);
Operating point search report:
---------------------------------
opreport =
Operating point search report for the Model aeroblk_guidance_airframe.
(Time-Varying Components Evaluated at time t=0)
Operating point search completed successfully using optimization.
States:
----------
Min x Max dxMin dx dxMax
__________ __________ __________ __________ __________ __________
(1.) aeroblk_guidance_airframe/Aerodynamics & Equations of Motion/3DOF (Body Axes)/Position
0 0 0 -Inf 967.6649 Inf
-3047.9999 -3047.9999 -3047.9999 -Inf -170.6254 Inf
(2.) aeroblk_guidance_airframe/Aerodynamics & Equations of Motion/3DOF (Body Axes)/Theta
0 0 0 -Inf -0.21604 Inf
(3.) aeroblk_guidance_airframe/Aerodynamics & Equations of Motion/3DOF (Body Axes)/U,w
967.6649 967.6649 967.6649 -Inf -14.0977 Inf
-170.6254 -170.6254 -170.6254 0 -7.439e-08 0
(4.) aeroblk_guidance_airframe/Aerodynamics & Equations of Motion/3DOF (Body Axes)/q
-Inf -0.21604 Inf 0 3.3582e-08 0
Inputs:
----------
Min u Max
_______ _______ _______
(1.) aeroblk_guidance_airframe/Fin Deflection
-Inf 0.13615 Inf
Outputs:
----------
Min y Max
__________ __________ __________
(1.) aeroblk_guidance_airframe/q
-Inf -0.21604 Inf
(2.) aeroblk_guidance_airframe/az
-Inf -7.439e-08 Inf
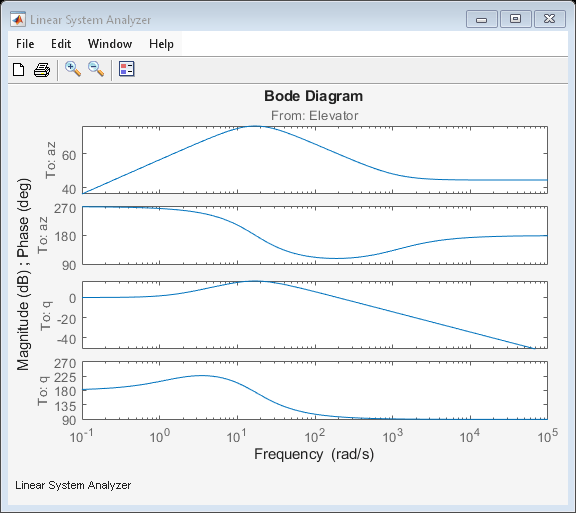
Select Trimmed States, Create LTI Object, and Plot Bode Response
Find index of desired states in the state vector. Then create the LTI object and view the frequency response as a Bode diagram.
names = sys.StateName; q_idx = find(strcmp('q',names)); az_idx = find(strcmp('U,w(2)',names)); airframe = ss(sys.A([az_idx q_idx],[az_idx q_idx]),sys.B([az_idx q_idx],:),sys.C(:,[az_idx q_idx]),sys.D); set(airframe,'inputname',{'Elevator'}, ... 'outputname',[{'az'} {'q'}]); linearSystemAnalyzer('bode',airframe);
Copyright 1990-2023 The MathWorks, Inc.