Symbol Synchronizer
Correct symbol timing clock skew
Libraries:
Communications Toolbox /
Synchronization
Description
The Symbol Synchronizer block corrects symbol timing clock skew for PAM, PSK, QAM, or OQPSK modulation schemes between a single-carrier transmitter and receiver. For more information, see Symbol Synchronization Overview.
Note
The input signal operates on a sample rate basis, while the output signal operates on a symbol rate basis.
Examples
Recover frame synchronization in a QPSK system impaired by a variable timing error. The example shows the benefit of performing symbol synchronization to assist the frame synchronization.
The cm_ex_symbol_frame_sync model compares frame synchronization performance with and without symbol synchronization. The Variable Fractional Delay block introduces a varying timing error to a root raised cosine (RRC) filtered QPSK signal. After the AWGN block, the receive path is duplicated to compare performance with and without a Symbol Synchronizer block in the path. The Symbol Synchronizer block corrects for clock skew between the transmitter and receiver, aligning the output signal with a valid clock reference. For the timing error conditions in this example, the symbol synchronizer returns a vector containing 99, 100, or 101 symbols for a 200-sample input vector.
The Frame Synchronizer block aligns the symbol stream along correct frame boundaries using the frame header present in the signal. It also provides the valid frame indicator signal to the BER Data Decoding subsystem, which calculates the bit error rate (BER). To avoid calculating the BER on nonvalid frames, the BER Data Decoding subsystem regenerates the input data bits rather than using the Bit Generation block output.

For a 20 dB signal-to-noise ratio and variable timing error in the range of [0, 0.9] samples, signal recovery is successful on the receiver path that includes symbol synchronization. The timing error varies over time, causing the constellation to oscillate between corrupted and clean states as seen in the Before Sym Sync signal in the Constellation Diagram block. The After Sym Sync signal in the constellation diagram shows that the symbol synchronizer removes the variable timing error signal impairment.

The BER with and without symbol synchronization show the performance improvement due to the Symbol Synchronizer block.
Error rate with symbol synchronization: 0.000 Error rate without symbol synchronization: 0.010
Correct a fixed symbol timing offset on a noisy QPSK signal by using the Symbol Synchronizer block. The number of symbols output by the Symbol Synchronizer block is variable size. If a fixed size signal is required for downstream processing, you can use a Selector (Simulink) block to convert the Symbol Synchronizer output to a fixed size signal.
Explore Model
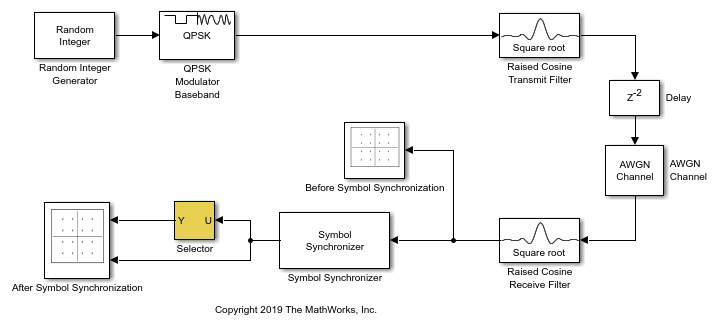
The Delay block adds a fixed timing error of 2 samples to the signal at the Raised Cosine Transmit Filter block output. Since the Raised Cosine Transmit Filter block configuration outputs 4 samples per symbol, the timing delay is 0.5 symbols. The output of the symbol synchronizer is converted to a fixed size signal by the Selector block.
View Results
To see how the symbol synchronizer improves QPSK symbol resolution, view the constellations of the signal before symbol synchronization, and the variable size and fixed size signals after symbol synchronization.


Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Tips
Demodulate symbol-timing synchronized, OQPSK-modulated signals by using the QPSK Demodulator Baseband block. You can not OQPSK demodulate the output of the Symbol Synchronizer block because, for an OQPSK-modulated input signal, the block outputs a symbol-rate QPSK-modulated signal. The OQPSK Demodulator Baseband block requires an OQPSK-modulated input signal with two samples per symbol.
Algorithms
The symbol timing synchronizer algorithm is based on a phased lock loop (PLL) algorithm that consists of four components:
Timing error detector (TED)
Interpolator
Interpolation controller
Loop filter
For OQPSK modulation, the in-phase and quadrature signal components are first aligned (as in QPSK modulation) using a state buffer to cache the last half symbol of the previous input. After initial alignment, the remaining synchronization process is the same as for QPSK modulation.
This block diagram shows an example of a timing synchronizer. In the figure, the symbol timing PLL operates on x(t), the received sample signal after matched filtering. The symbol timing PLL outputs the symbol signal, , after correcting for the clock skew between the transmitter and receiver.

The time delay is estimated from the fixed-rate samples of the matched filter, which are asynchronous with the symbol rate. Because the resulting samples are not aligned with the symbol boundaries, an interpolator is used to "move" the samples. Because the time delay is unknown, the interpolator must be adaptive. Moreover, because the interpolant is a linear combination of the available samples, it can be thought of as the output of a filter.

The interpolator uses a piecewise parabolic interpolator with a Farrow structure and coefficient α set to 1/2 (see Rice, Michael, Digital Communications: A Discrete-Time Approach).
Interpolation control provides the interpolator with the basepoint index and fractional interval. The basepoint index is the sample index nearest to the interpolant. The fractional interval is the ratio of the time between the interpolant and its basepoint index and the interpolation interval.

Interpolation is performed for every sample, and a strobe signal is used to determine if the interpolant is output. The synchronizer uses a modulo-1 counter interpolation control to provide the strobe and the fractional interval for use with the interpolator.
The synchronizer uses a proportional-plus integrator (PI) loop filter. The proportional gain, K1, and the integrator gain, K2, are calculated by
and
The interim term, θ, is given by
where:
Nsps is the number of samples per symbol.
ζ is the damping factor.
BnTs is the loop bandwidth (Bn) normalized to the symbol rate (Ts).
Kp is the detector gain.

References
[1] Rice, Michael. Digital Communications: A Discrete-Time Approach. Upper Saddle River, NJ: Prentice Hall, 2008.
[2] Mengali, Umberto and Aldo N. D’Andrea. Synchronization Techniques for Digital Receivers. New York: Plenum Press, 1997.
Extended Capabilities
Version History
Introduced in R2015a