Creazione di modelli a tempo discreto
Questo esempio mostra come creare modelli lineari a tempo discreto utilizzando i comandi tf, zpk, ss e frd.
Definizione dei modelli a tempo discreto
Control System Toolbox™ consente di creare modelli sia a tempo continuo che a tempo discreto. La sintassi per la creazione di modelli a tempo discreto è simile a quella dei modelli a tempo continuo, con la differenza che è necessario fornire anche un tempo di campionamento (intervallo di campionamento in secondi).
Ad esempio, per specificare la funzione di trasferimento a tempo discreto:
con periodo di campionamento Ts = 0.1 s, tipo:
num = [ 1 -1 ]; den = [ 1 -1.85 0.9 ]; H = tf(num,den,0.1)
H =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
oppure, in modo equivalente:
z = tf('z',0.1);
H = (z - 1) / (z^2 - 1.85*z + 0.9);Per specificare il modello stato-spazio a tempo discreto:
con periodo di campionamento Ts = 0.1 s, tipo:
sys = ss(.5,1,.2,0,0.1);
Riconoscimento dei sistemi a tempo discreto
Esistono diversi modi per determinare se il modello LTI è a tempo discreto:
Il display visualizza un valore del tempo di campionamento diverso da zero
sys.Tsoget(sys,'Ts')restituisce un valore del tempo di campionamento diverso da zero.isdt(sys)restituisce vero.
Ad esempio, per la funzione di trasferimento H specificata sopra,
H.Ts
ans = 0.1000
isdt(H)
ans = logical
1
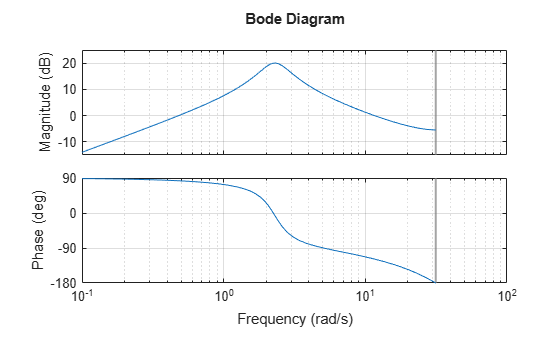
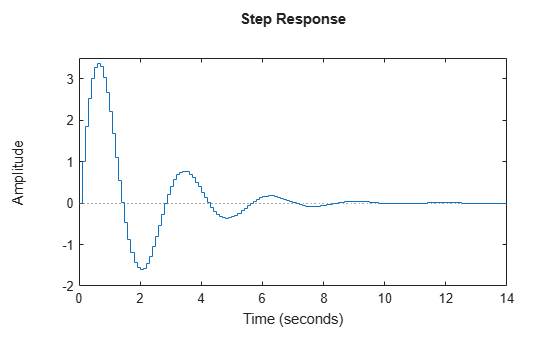
I sistemi a tempo discreto possono inoltre essere individuati ricercando i seguenti tratti:
Grafici di risposta temporale: la curva di risposta ha un aspetto scalare dovuto alla natura dei dati campionati
Grafici di Bode: è presente una barra verticale che segna la frequenza di Nyquist (pi greco diviso per il tempo di campionamento).
I grafici seguenti mostrano questi tratti caratteristici:
step(H)
bode(H), grid