trackerTOMHT
Multi-hypothesis, multi-sensor, multi-object tracker
Description
The trackerTOMHT
System object™ is a multi-hypothesis tracker capable of processing detections of multiple
targets from multiple sensors. The tracker initializes, confirms, predicts, corrects, and
deletes tracks. Inputs to the tracker are detection reports generated by objectDetection, fusionRadarSensor,
irSensor, or
sonarSensor
objects. The tracker estimates the state vector and state vector covariance matrix for each
track. The tracker assigns detections based on a track-oriented, multi-hypothesis approach.
Each detection is assigned to at least one track. If the detection cannot be assigned to any
track, the tracker creates a track.
Any new track starts in a tentative state. If enough detections are
assigned to a tentative track, its status changes to confirmed. If the
detection already has a known classification (the ObjectClassID field of
the returned track is nonzero), that track is confirmed immediately. When a track is
confirmed, the multi-object tracker considers the track to represent a physical object. If
detections are not assigned to the track within a specifiable number of updates, the track is
deleted. For an overview of how the tracker functions, see Algorithms.
To track objects using the multi-hypothesis tracker:
Create the
trackerTOMHTobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
tracker = trackerTOMHTtrackerTOMHT
System object with default property values.
tracker = trackerTOMHT(Name,Value)trackerTOMHT('FilterInitializationFcn',@initcvukf,'MaxNumTracks',100)
creates a multi-object tracker that uses a constant-velocity, unscented Kalman filter and
allows a maximum of 100 tracks. Enclose each property name in quotes.
Properties
Usage
To process detections and update tracks, call the tracker with arguments, as if it were a function (described here).
Syntax
Description
confirmedTracks = tracker(detections,time)detections, at the update time, time.
Confirmed tracks are corrected and predicted to the update time.
confirmedTracks = tracker(detections,time,costMatrix)costMatrix.
To enable this syntax, set the HasCostMatrixInput property to
true.
confirmedTracks = tracker(___,detectableBranchIDs)detectableBranchIDs.
To enable this syntax, set the HasDetectableBranchIDsInput
property to true.
[
also returns a list of tentative tracks, confirmedTracks,tentativeTracks,allTracks] = tracker(___)tentativeTracks, and a list
of all tracks, allTracks.
[___,
also returns information, analysisInformation] = tracker(___)analysisInformation, useful for track
analysis.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Algorithms
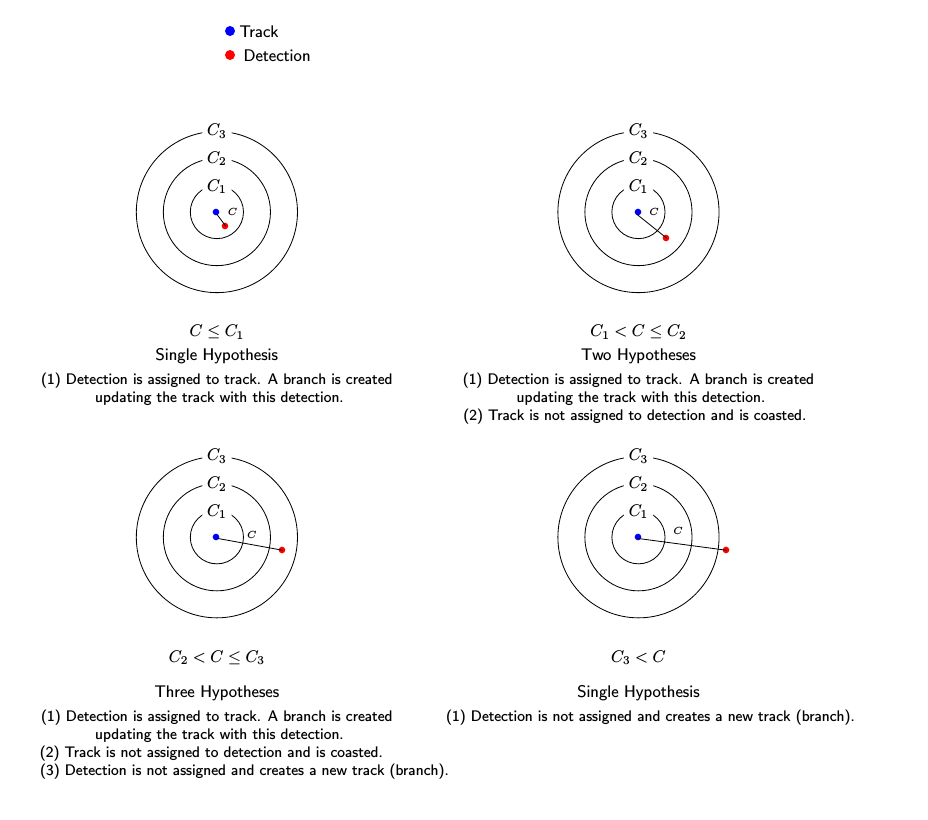
Three assignment thresholds, C1 , C2, and C3, control (1) the assignment of a detection to a track, (2) the creation of a new branch from a detection, and (3) the creation of a new branch from an unassigned track. The threshold values must satisfy: C1 <= C2 <= C3.
If the cost of an assignment is C = costmatrix(i,j), the following
hypotheses are created based on comparing the cost to the values of the assignment
thresholds. Below each comparison, there is a list of the possible hypotheses.
Tips:
Increase the value of C3 if there are detections that should be assigned to tracks but are not. Decrease the value if there are detections that are assigned to tracks they should not be assigned to (too far away).
Increasing the values C1 and C2 helps control the number of track branches that are created. However, doing so reduces the number of branches (hypotheses) each track has.
To allow each track to be unassigned, set C1 = 0.
To allow each detection to be unassigned, set C2 = 0.
References
[1] Werthmann, J. R.. "Step-by-Step Description of a Computationally Efficient Version of Multiple Hypothesis Tracking." In International Society for Optics and Photonics, Vol. 1698, pp. 228-301, 1992.
[2] Blackman, S., and R. Popoli. Design and Analysis of Modern Tracking Systems. Artech House Radar Library, Boston, 1999.
Extended Capabilities
Version History
Introduced in R2018bSee Also
Functions
Objects
objectDetection|trackingKF|trackingEKF|trackingKF|trackingUKF|trackingCKF|trackingPF|trackingMSCEKF|trackingGSF|trackingIMM|trackingABF|objectTrack|fusionRadarSensor|sonarSensor|irSensor|trackerGNN|trackBranchHistory