Diesel Engine In-Line Injection System
This example shows an in-line multi-element diesel injection system. It consists of a cam shaft, a lift pump, four in-line injection pumps, and four injectors.
Model

Injection System Description
The diesel injection system simulated by this model is shown in the schematic below.

Figure 1: Injection system schematic diagram, adapted from H. Heisler, Vehicle and Engine Technology (second edition), 1999
The system structure is categorized as an in-line multi-element injection system. It consists of the following basic units:
Cam shaft
Lift pump
In-line injection pump with four pumping elements, one element per engine cylinder
Injectors
The cam shaft carries five cams. The first one is the eccentric cam to actuate the lift pump. The remaining four drive the plungers of the injection pump. The cams are installed in such a way that pumping elements deliver fuel in the firing order and at the correct instant in the engine's cycle of operation. The lift pump supplies fuel to the intake of injection pump elements. Each element of the injection pump consists of a cam-driven plunger, a delivery valve, and the governor assembly. The purpose of the governor is to control the volume of the fuel delivered by the plunger to the engine cylinder.
The objective of the simulation is to investigate the entire system operation. The objective dictates the extent of idealization of each component in the system. All of the system units will be described in more detail in the following sections.
Note: The model of the system does not represent any particular injection system. All workspace parameters have been assigned based on practical considerations and do not represent any particular manufacturer parameters.
Cam Shaft Subsystem

The model of a cam shaft is built of five cam models. There are four parabolic profile cams and one eccentric cam. This motion profile is computed as a function of the shaft angle, obtained by integrating the shaft angular velocity. The cam that drives the plunger of the injection pump has a parabolic profile under which the follower moves back and forth at constant acceleration. It is described by the following set of equations:

![$$ x = s \left[1 - 2 \left(1 - \frac{\theta - \theta_E}{\alpha}\right)^2 \right], \quad \textrm{if} \quad \theta_E + \frac{\alpha}{2} \le \theta < \theta_E + \alpha $$](../../examples/simscapefluids/win64/DieselEngineInLineInjectionSystemExample_eq13116301103552164646.png)

![$$ x = s \left[1 - 2 \left(\frac{\theta - \theta_R}{\beta}\right)^2 \right], \quad \textrm{if} \quad \theta_R \le \theta < \theta_R + \frac{\beta}{2} $$](../../examples/simscapefluids/win64/DieselEngineInLineInjectionSystemExample_eq05114822569471347447.png)

where
 is the follower position
is the follower position is the follower stroke
is the follower stroke is the cam angle (with phase angle accounted)
is the cam angle (with phase angle accounted) is the start of extension angle
is the start of extension angle is the extension angle
is the extension angle is the start of retraction angle
is the start of retraction angle is the retraction angle
is the retraction angle
As a result, at the start of extension angle the follower starts moving up and reaches its top position after the shaft turns an additional extension angle. The follower starts the return stroke at the start of retraction angle and it takes retraction angle to complete this motion. The difference between the end of extension and the start of retraction sets the dwell angle at fully extended position. The profile is implemented in the Simscape™ language file ParabolicCam.ssc using the Simscape Component block.
Each of the four parabolic cams are offset from each other by a phase angle. The corresponding injection pump plunger positions are thus also offset from each other. To achieve this, for a brief period of initialization_time after the start of simulation, an appropriate initialization shaft speed is sent to each parabolic cam to rotate it to the correct phase angle. After the initialization_time, the main portion of the fuel injection system simulation begins.
The following plot shows the extension of each injection pump as the cam shaft rotates. When the extension is zero, all of the fuel has been expelled from the pump. The firing order of the engine cylinders is 1-3-4-2.

The profile of the eccentric cam is computed with the formula

where  is the eccentricity. The equation is implemented using physical signal blocks in the Simscape Foundation Library.
is the eccentricity. The equation is implemented using physical signal blocks in the Simscape Foundation Library.

Lift Pump Subsystem

The model of the lift pump, which is a piston-and-diaphragm type pump, is built of a Single-Acting Actuator (IL) block and two Check Valve (IL) blocks. The check valves model inlet and outlet valves installed on both sides of the lift pump (see Figure 1). The contact between the pump rod roller and the cam is represented with the Translational Hard Stop block. The Translational Spring block models two springs in the pump that maintain permanent contact between the roller and the cam.
Injection Pump Subsystem

The in-line injection pump is a four-element pumping unit. Each element supplies fuel to injector which expels fuel to its engine cylinder. All four elements are identical by design. The Injection Pump subsystem represents the pump plunger and the pump control mechanism, while the Injector subsystem models the injector installed directly on the engine cylinder (see Figure 1).
The pump plunger oscillates inside the pump barrel driven by the cam (see Figure 1). The plunger is modeled as a Single-Acting Actuator (IL) block. When the plunger moves down, the plunger chamber is filled with fuel under pressure developed by the lift pump. The fuel enters through two orifices, the inlet port and the spill port (see Figure 2 below).

Figure 2: Plunger interaction with control orifices in the barrel, adapted from H. Heisler, Vehicle and Engine Technology (second edition), 1999
The model of the plunger control mechanism is based on the following assumptions:
1. There are three variable orifices modeled by Spool Orifice (IL) blocks in the control circuit: inlet port, spill port, and orifice formed by the helical groove and the spill port. The openings of the inlet and the spill orifices depend on the plunger motion, while the opening of the helical groove orifice is a function of the plunger motion and the plunger rotation. For the sake of simplicity, the displacement generated by the plunger rotation is represented as a source of linear motion which is combined with the plunger displacement.
2. The figure below shows all the dimensions necessary to parameterize the Spool Orifice (IL) blocks:

Figure 3: Schematic of injection plunger dimensions
where the schematic notations and corresponding workspace parameter names are
 is the inlet port orifice diameter (
is the inlet port orifice diameter (inlet_orifice_diameter) is the spill port orifice diameter (
is the spill port orifice diameter (spill_orifice_diameter) is the plunger stroke (
is the plunger stroke (plunger_stroke) is the distance between the inlet orifice and the top plunger position (
is the distance between the inlet orifice and the top plunger position (-plunger_stroke + safety_gap + inlet_orifice_diameter + inlet_offset) is the distance between the spill port orifice and the top plunger position (
is the distance between the spill port orifice and the top plunger position (-plunger_stroke + safety_gap + spill_orifice_diameter) is the distance between the spill port orifice and the upper edge of the helical groove
is the distance between the spill port orifice and the upper edge of the helical groove
The inlet orifice is generally located higher than the spill orifice. This is represented by the workspace parameter inlet_offset.
3. In parameterizing the orifices, the plunger top position is taken as the origin and the motion in the upward direction is considered as the motion in positive direction. Therefore, the inlet and spill port orifices must be set to open with negative spool displacement, while the helical groove orifice must be set to open with positive spool displacement since it opens when the plunger moves upward.
4. The plunger effective stroke is plunger_stroke - safety_gap - inlet_orifice_diameter - inlet_offset. The distance between the spill port orifice and the upper edge of the helical groove, , can be adjusted by rotating the plunger. This adjustment is modeled by shifting the plunger position signal to the helical groove orifice by a control signal. The larger the control signal, the sooner the helical groove orifice is opened, thus decreasing the volume of fuel delivered to the cylinder. The maximum value of the control signal is equal to the effective stroke. At this value, the helical groove orifice remains open all the time.
Injector Subsystem
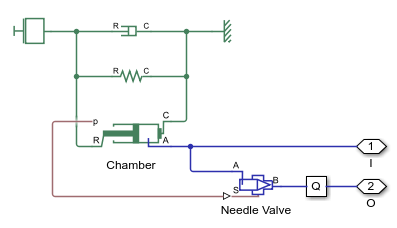
The model of the injector is based on the Single-Acting Actuator (IL) block and the Needle Valve (IL) block. The needle valve is normally closed by the force developed by the preloaded spring. As the force developed in the actuator chamber overcomes the spring force, the needle valve opens and allows fuel to be injected into the engine cylinder.
Simulation Results from Scopes
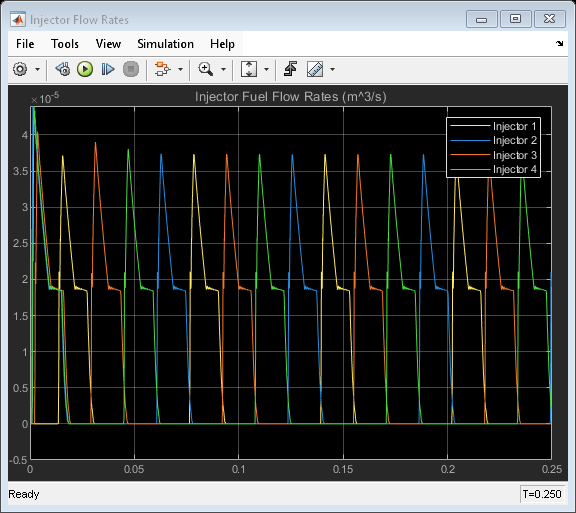
Simulation Results from Simscape Logging
This plot shows the positions and outlet flow rates of Injection Pump 1 and Injector 1. The effect of the cam profile is shown in the displacement of Injection Pump 1. During the second half of the cam stroke, fuel exits the injection pump and passes into the injector. The fuel exits the injector via a needle valve. The injector is modeled as an actuator chamber with a preloaded spring which acts to store the fuel from the injection pump temporarily and push it out of the injector more smoothly.
