geometricTransform2d
2-D geometric transformation object
Description
A geometricTransform2d object defines a custom 2-D geometric
transformation using point-wise mapping functions.
Creation
Description
tform = geometricTransform2d(inverseFcn)geometricTransform2d object and sets the inverse mapping
InverseFcn
property.
tform = geometricTransform2d(inverseFcn,forwardFcn)ForwardFcn.
Properties
Object Functions
outputLimits | Find output spatial limits given input spatial limits |
transformPointsForward | Apply forward geometric transformation |
transformPointsInverse | Apply inverse geometric transformation |
Examples
Specify the packed (x,y) coordinates of five input points. The packed coordinates are stored in a 5-by-2 matrix, where the x-coordinate of each point is in the first column, and the y-coordinate of each point is in the second column.
XY = [10 15;11 32;15 34;2 7;2 10];
Define the inverse mapping function. The function accepts and returns points in packed (x,y) format.
inversefn = @(c) [c(:,1)+c(:,2),c(:,1)-c(:,2)]
inversefn = function_handle with value:
@(c)[c(:,1)+c(:,2),c(:,1)-c(:,2)]
Create a 2-D geometric transform object, tform, that stores the inverse mapping function.
tform = geometricTransform2d(inversefn)
tform =
geometricTransform2d with properties:
InverseFcn: @(c)[c(:,1)+c(:,2),c(:,1)-c(:,2)]
ForwardFcn: []
Dimensionality: 2
Apply the inverse geometric transform to the input points.
UV = transformPointsInverse(tform,XY)
UV = 5×2
25 -5
43 -21
49 -19
9 -5
12 -8
Specify the x- and y-coordinates vectors of five points to transform.
x = [10 11 15 2 2]; y = [15 32 34 7 10];
Define the inverse and forward mapping functions. Both functions accept and return points in packed (x,y) format.
inversefn = @(c) [c(:,1).^2,sqrt(c(:,2))]; forwardfn = @(c) [sqrt(c(:,1)),c(:,2).^2];
Create a 2-D geometric transform object, tform, that stores the inverse mapping function and the optional forward mapping function.
tform = geometricTransform2d(inversefn,forwardfn)
tform =
geometricTransform2d with properties:
InverseFcn: @(c)[c(:,1).^2,sqrt(c(:,2))]
ForwardFcn: @(c)[sqrt(c(:,1)),c(:,2).^2]
Dimensionality: 2
Apply the inverse geometric transform to the input points.
[u,v] = transformPointsInverse(tform,x,y)
u = 1×5
100 121 225 4 4
v = 1×5
3.8730 5.6569 5.8310 2.6458 3.1623
Apply the forward geometric transform to the transformed points u and v.
[x,y] = transformPointsForward(tform,u,v)
x = 1×5
10 11 15 2 2
y = 1×5
15.0000 32.0000 34.0000 7.0000 10.0000
Define an inverse mapping function that applies anisotropic scaling. The function must accept and return packed (x,y) coordinates, where the x-coordinate of each point is in the first column, and the y-coordinate of each point is in the second column.
xscale = 0.3; yscale = 0.5; inversefn = @(xy) [xscale*xy(:,1), yscale*xy(:,2)];
Create a 2-D geometric transform object, tform, that stores the inverse mapping function.
tform = geometricTransform2d(inversefn)
tform =
geometricTransform2d with properties:
InverseFcn: @(xy)[xscale*xy(:,1),yscale*xy(:,2)]
ForwardFcn: []
Dimensionality: 2
Read an image to be transformed.
I = imread('cameraman.tif');
imshow(I)
Use imwarp to apply the inverse geometric transform to the input image. The image is enlarged vertically by a factor of 2 (the inverse of yscale) and horizontally by a factor of 10/3 (the inverse of xscale).
Itransformed = imwarp(I,tform); imshow(Itransformed)

Define an inverse mapping function that accepts packed (x,y) coordinates, where the x-coordinate of each point is in the first column, and the y-coordinate of each point is in the second column. The inverse mapping function in this example takes the square of the polar radial component.
r = @(c) sqrt(c(:,1).^2 + c(:,2).^2); w = @(c) atan2(c(:,2), c(:,1)); f = @(c) [r(c).^2 .* cos(w(c)), r(c).^2 .* sin(w(c))]; g = @(c) f(c);
Create a 2-D geometric transform object, tform, that stores the inverse mapping function.
tform = geometricTransform2d(g);
Read a color image to be transformed.
I = imread('peppers.png');
imshow(I)
Create an imref2d object, specifying the size and world limits of the input and output images.
Rin = imref2d(size(I),[-1 1],[-1 1]); Rout = imref2d(size(I),[-1 1],[-1 1]);
Apply the inverse geometric transform to the input image.
Itransformed = imwarp(I,Rin,tform,'OutputView',Rout);
imshow(Itransformed)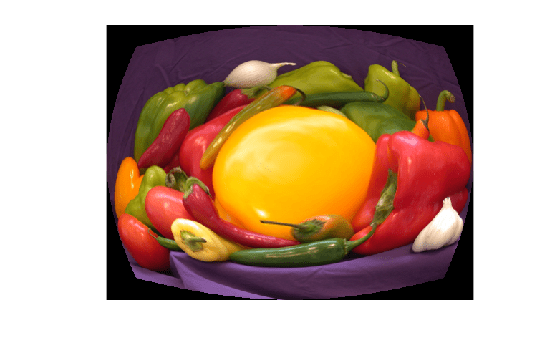
Version History
Introduced in R2018b