xcov
Cross-covariance
Description
c = xcov(x,y)x and shifted (lagged) copies of a vector y as
a function of the lag. If x and y have different
lengths, the function appends zeros to the end of the shorter vector so it has the same
length as the other.
c = xcov(x)x. If x is a matrix, then c
is a matrix whose columns contain the autocovariance and cross-covariance sequences for
all combinations of the columns of x.
Examples
Create a vector of random numbers x and a vector y that is equal to x shifted by 3 elements to the right. Compute and plot the estimated cross-covariance of x and y. The largest spike occurs at the lag value when the elements of x and y match exactly (-3).
rng default
x = rand(20,1);
y = circshift(x,3);
[c,lags] = xcov(x,y);
stem(lags,c)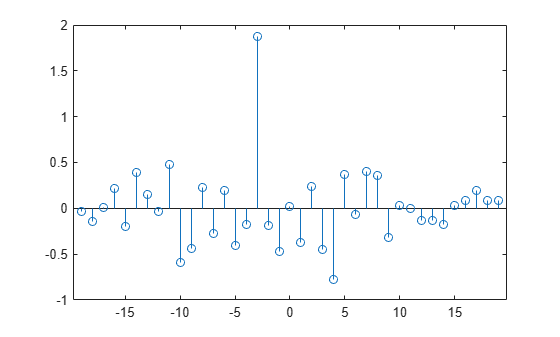
Create a 20-by-1 random vector, then compute and plot the estimated autocovariance. The largest spike occurs at zero lag, where the vector is exactly equal to itself.
rng default
x = rand(20,1);
[c,lags] = xcov(x);
stem(lags,c)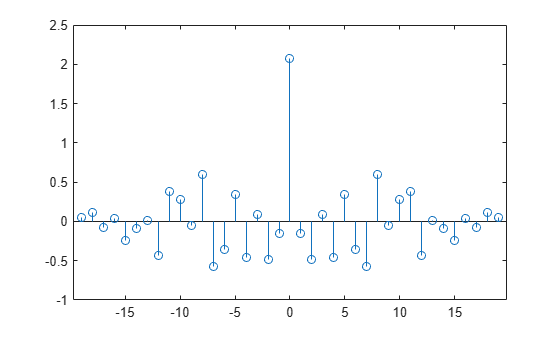
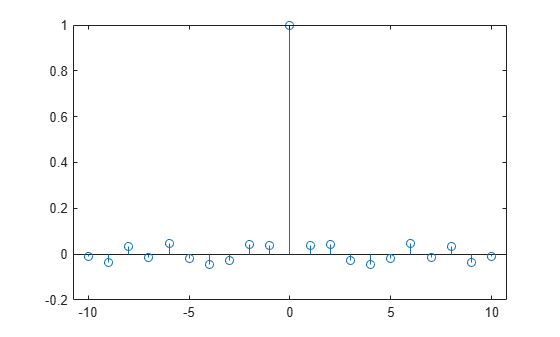
Compute and plot the estimated autocovariance of white Gaussian noise, , for . Normalize the sequence so that it is unity at zero lag.
rng default x = randn(1000,1); maxlag = 10; [c,lags] = xcov(x,maxlag,'normalized'); stem(lags,c)
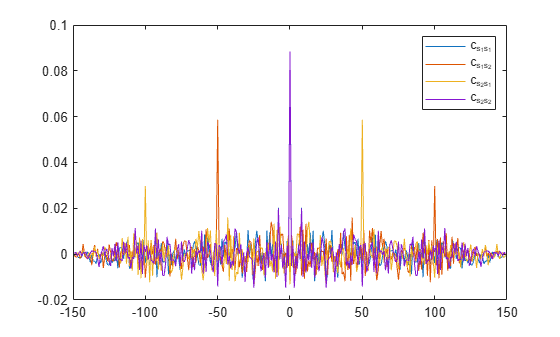
Create a signal made up of two signals that are circularly shifted from each other by 50 samples.
rng default
shft = 50;
s1 = rand(150,1);
s2 = circshift(s1,[shft 0]);
x = [s1 s2];Compute and plot biased estimates of the autocovariance and mutual cross-covariance sequences. The output matrix c is organized as four column vectors such that . has maxima at -50 and +100 and has maxima at +50 and -100 as a result of the circular shift.
[c,lags] = xcov(x,'biased'); plot(lags,c) legend('c_{s_1s_1}','c_{s_1s_2}','c_{s_2s_1}','c_{s_2s_2}')
Input Arguments
Output Arguments
More About
References
[1] Orfanidis, Sophocles J. Optimum Signal Processing: An Introduction. 2nd Edition. New York: McGraw-Hill, 1996.
[2] Larsen, Jan. “Correlation
Functions and Power Spectra.” November, 2009. https://www2.imm.dtu.dk/pubdb/edoc/imm4932.pdf