Questa pagina si riferisce alla release precedente. La corrispondente pagina in inglese è stata rimossa nella release attuale.
Localizzazione e stima della posa
Utilizza algoritmi di localizzazione e stima della posizione per orientare il tuo veicolo nell'ambiente. La fusione dei sensori inerziali utilizza filtri per migliorare e combinare le letture dei sensori per IMU, GPS e altri. Gli algoritmi di localizzazione, come la localizzazione Monte Carlo e lo scan matching, stimano la tua posizione in una mappa nota utilizzando letture di sensori di distanza o LiDAR. I grafici delle pose tengono traccia delle pose stimate e possono essere ottimizzati in base ai vincoli dei bordi e alle chiusure dei loop.
Per modellare sensori specifici, vedere Modelli di sensori.
Per la localizzazione e la mappatura simultanee, vedere SBATTERE .
Categorie
- Fusione di sensori inerziali
Navigazione inerziale con IMU e GPS, fusione dei sensori, regolazione personalizzata dei filtri
- Algoritmi di localizzazione
Filtri di particelle, corrispondenza di scansione, localizzazione Monte Carlo, grafici di posa, odometria
Esempi in primo piano
Fusione IMU e GPS per la navigazione inerziale
Questo esempio mostra come è possibile creare un algoritmo di fusione IMU + GPS adatto ai veicoli aerei senza pilota (UAV) o ai quadricotteri.
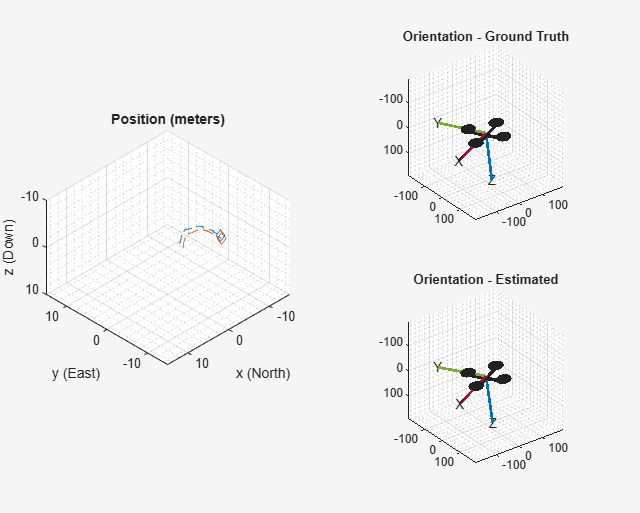
Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you:
Estimate Phone Orientation Using Sensor Fusion
MATLAB® Mobile™ reports sensor data from the accelerometer, gyroscope, and magnetometer on Apple or Android® mobile devices. Raw data from each sensor or fused orientation data can be obtained. This example shows how to compare the fused orientation data from the phone with the orientation estimate from the ahrsfilter object.

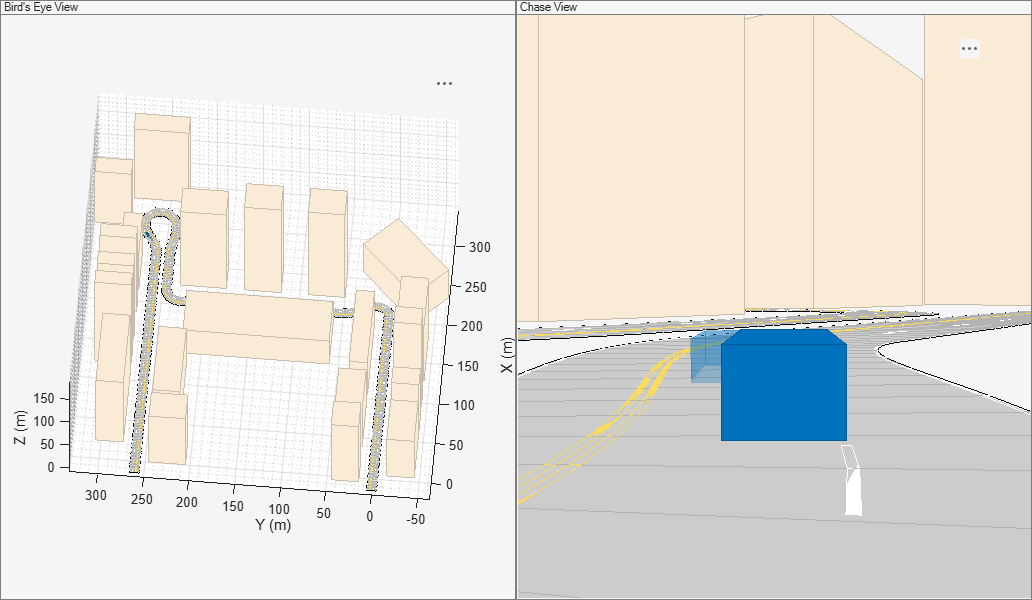
Stima della posizione e dell'orientamento di un veicolo terrestre
Questo esempio mostra come stimare la posizione e l'orientamento dei veicoli terrestri combinando i dati provenienti da un'unità di misura inerziale (IMU) e da un ricevitore del sistema di posizionamento globale (GPS).

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.
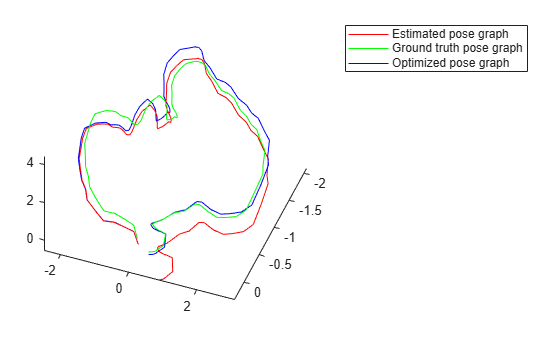
Reduce Drift in 3-D Visual Odometry Trajectory Using Pose Graphs
Reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization. Visual odometry estimates the current global pose of the camera (current frame). Because of poor matching or errors in 3-D point triangulation, robot trajectories often tends to drift from the ground truth. Loop closure detection and pose graph optimization reduce this drift and correct for errors.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.