SBATTERE
La localizzazione e mappatura simultanea (SLAM) utilizza gli algoritmi Mappatura e per creare una mappa e localizzare contemporaneamente il veicolo su tale mappa. Utilizza lidarSLAM per mettere a punto il tuo algoritmo SLAM che elabora le scansioni lidar e le stime della posa dell'odometria per creare iterativamente una mappa. Utilizzare buildMap per acquisire dati registrati e filtrati per creare una mappa utilizzando SLAM. L'applicazione SLAM Map Builder consente di modificare manualmente le pose relative e di allineare le scansioni per migliorare la precisione della mappa.
Per maggiori informazioni su cosa sia SLAM e altri strumenti SLAM in altre toolboxMATLAB®, vedere Cos'è SLAM?.
App
| SLAM Map Builder | Creare mappe a griglia 2D utilizzando SLAM basato su lidar |
Funzioni
Argomenti
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Factor Graph for SLAM
Learn about factor graph and how it use it for SLAM applications.
Esempi in primo piano

Performant and Deployable Monocular Visual SLAM
Visual simultaneous localization and mapping (vSLAM) refers to the process of calculating the position and orientation of a camera with respect to its surroundings while simultaneously mapping the environment. Applications for vSLAM include augmented reality, robotics, and autonomous driving. In this example, the algorithm uses only visual inputs from the camera.

Build a Map from Lidar Data Using SLAM
Process 3-D lidar data from a sensor on a vehicle to progressively build a map and estimate the trajectory using SLAM.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement a monocular visual SLAM algorithm to estimate camera poses and deploy generated C++ code using ROS.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Use RGB and depth images from a robot to simulate a RGB-D visual SLAM system in Simulink.

EKF-Based Landmark SLAM
Implement landmark SLAM using the Extended Kalman Filter algorithm to track the path of a vehicle and map the surroundings.
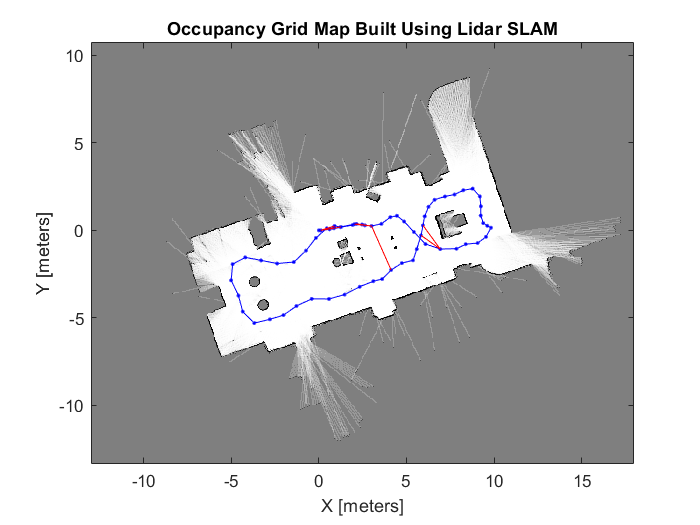
Implementare la localizzazione e la mappatura simultanee (SLAM) con scansioni Lidar
Implementare SLAM offline utilizzando un grafico di posa e una serie di scansioni lidar e creare una mappa dell'ambiente.