gnssconstellation
Satellite locations at specified time
Syntax
Description
The gnssconstellation function returns the satellite
positions and velocities for specified times in Earth-centered Earth-fixed (ECEF) coordinate
system.
[
additionally specifies the GNSS file type from which you obtained the navigation message
data. This syntax enables you to process navigation data obtained from either a RINEX file,
a SEM almanac file, a YUMA almanac file, or a Galileo XML almanac file.satPos,satVel,satID] = gnssconstellation(t,navData,GNSSFileType=gnssFileType)
Note
The gnssconstellation function determines the satellite position and
satellite velocities by propagating the current orbital parameters specified by the
RINEX file, SEM almanac file, a YUMA almanac file, or a Galileo XML almanac file to the
query time. To get more accurate satellite positions and velocities, ensure you are
using the navigation file released for the time that you are querying at. For more
information about orbital parameter validity, see Orbital Parameters.
Examples
Get the current satellite positions and velocities from the GNSS satellites. Access the orbital parameters from IS-GPS-200M Interface Specification and calculate the position and velocities in ECEF coordinates for the given time. Display the satellite positions.
t = datetime('now','TimeZone','Local'); [satPos,satVel] = gnssconstellation(t); disp(satPos)
1.0e+07 *
-1.8420 -1.3755 1.3302
0.2736 2.3122 1.2779
0.6793 -1.6282 -1.9854
1.4564 -0.5010 -2.1638
-0.4888 2.3594 -1.1173
0.4407 1.8299 -1.8739
-1.8810 0.9703 1.6045
1.4455 -2.2226 -0.1578
-1.5531 -0.3080 2.1324
-2.5817 0.3377 -0.5242
1.0653 1.4037 -1.9872
2.1960 0.8736 -1.2118
1.1689 -1.3591 1.9598
-1.0672 -2.4060 0.3557
1.7189 1.8354 0.8550
1.8581 1.0004 1.6128
-1.3128 0.7733 -2.1755
-0.0938 -2.2280 1.4427
1.6766 0.0001 2.0599
-1.2783 2.3249 0.1223
-0.4500 -1.8219 -1.8794
-1.8096 1.6568 -1.0170
-1.0566 1.3897 2.0017
-1.5229 -1.2598 -1.7743
-2.3324 -0.7464 -1.0281
2.4919 -0.5080 -0.7659
2.6163 0.2820 0.3602
Use the lookangles function to get the azimuth and elevation angles of satellites for given satellite and receiver positions. Specify a mask angle of 5 degrees. Get the satellite positions using the gnssconstellation function.
Specify a receiver position in geodetic coordinates (latitude, longitude, altitude).
recPos = [42 -71 50];
Get the satellite positions for the current time.
t = datetime('now');
gpsSatPos = gnssconstellation(t);Specify a mask angle of 5 degrees.
maskAngle = 5;
Get the azimuth and elevation look angles for the satellite positions. The vis output indicates which satellites are visible. Get the total using nnz.
[az,el,vis] = lookangles(recPos,gpsSatPos,maskAngle);
fprintf('%d satellites visible at %s.\n',nnz(vis),t);8 satellites visible at 19-Apr-2026 09:05:06.
Read one set of GPS satellites from the GPS navigation message in a RINEX file.
filename = "GODS00USA_R_20211750000_01D_GN.rnx";
data = rinexread(filename);
gpsData = data.GPS;
[~,satIdx] = unique(gpsData.SatelliteID);
gpsData = gpsData(satIdx,:);Get the satellite positions, velocities, and IDs at the first time step.
t = gpsData.Time(1); [satPos,satVel,satID] = gnssconstellation(t,gpsData)
satPos = 31×3
107 ×
-1.5630 -0.1882 2.1186
1.3808 2.1970 -0.4861
-2.0061 0.7606 1.5492
-2.5625 -0.0140 -0.7096
1.4896 0.5448 -2.1487
0.6129 2.5407 0.4615
-1.0081 1.3751 -1.9877
-2.5811 -0.6135 -0.3246
-1.9289 0.8690 -1.6134
0.9542 -2.2526 1.0113
2.0186 -0.5308 1.6093
2.0993 1.3376 -0.9594
-1.0551 2.2204 1.0002
2.6312 0.3802 -0.3333
-1.0047 -1.1218 -2.2112
⋮
satVel = 31×3
103 ×
-0.8888 -2.5914 -0.8416
0.0362 0.7543 3.1043
1.1203 -1.6505 2.2591
-0.8301 -0.4385 2.9967
-1.6023 2.1607 -0.5493
-0.3948 -0.4708 3.1591
-1.0322 -2.4133 -1.1748
0.4370 -0.1710 -3.1339
-1.9860 -0.5032 2.1087
0.9968 -0.8308 -2.8502
-1.3152 1.6379 2.1695
-1.2059 -0.1406 -2.8610
-1.0488 0.7681 -2.8132
-0.3937 0.3259 -3.0428
1.9524 -1.9313 0.1383
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
12
13
14
15
16
⋮
Read GPS navigation message data from a SEM almanac file.
data = semread("semalmanac_2022-4-10.al3")data=31×16 timetable
Time GPSWeekNumber GPSTimeOfApplicability PRNNumber SVN AverageURANumber Eccentricity InclinationOffset RateOfRightAscension SqrtOfSemiMajorAxis GeographicLongitudeOfOrbitalPlane ArgumentOfPerigee MeanAnomaly ZerothOrderClockCorrection FirstOrderClockCorrection SatelliteHealth SatelliteConfiguration
____________________ _____________ ______________________ _________ ___ ________________ ____________ _________________ ____________________ ___________________ _________________________________ _________________ ___________ __________________________ _________________________ _______________ ______________________
12-Apr-2022 16:50:54 2205 2.3347e+05 1 63 0 0.01171 0.014391 -2.4484e-09 5153.6 -0.9271 0.28359 -0.23387 0.00038624 -7.276e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 2 61 0 0.020515 0.0074596 -2.5029e-09 5153.6 -0.95587 -0.45355 -0.18869 -0.00065327 0 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 3 69 0 0.0040326 0.0096912 -2.5757e-09 5153.6 -0.59787 0.29979 -0.59118 -0.00020409 -1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 4 74 0 0.0017715 0.0059814 -2.4665e-09 5153.6 -0.25353 -0.95004 0.31619 -0.00017643 3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 5 50 0 0.0059118 0.0055599 -2.6193e-09 5153.6 -0.61097 0.32122 0.61334 -7.8201e-05 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 6 67 0 0.0026565 0.014187 -2.452e-09 5153.7 -0.92973 -0.28158 -0.1523 0.00026417 1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 7 48 0 0.015865 0.0028152 -2.5138e-09 5153.6 0.07053 -0.72524 -0.44853 0.00032043 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 8 72 0 0.0074387 0.0068531 -2.4738e-09 5153.7 0.72894 0.048076 0.467 -6.3896e-05 0 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 9 68 0 0.0021076 0.0037479 -2.5029e-09 5153.5 -0.27053 0.59743 0.61325 -0.00034428 3.638e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 10 73 0 0.0075555 0.0096321 -2.5793e-09 5153.6 -0.59875 -0.79359 -0.88495 -0.0003767 -1.0914e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 11 78 0 0.00031376 0.0064716 -2.5393e-09 5153.7 -0.9136 0.85276 0.49013 -4.1962e-05 7.276e-12 63 12
12-Apr-2022 16:50:54 2205 2.3347e+05 12 58 0 0.0087256 0.008585 -2.5575e-09 5153.5 0.42482 0.40497 -0.64747 -0.00019932 -7.276e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 13 43 0 0.0058503 0.0083656 -2.4374e-09 5153.6 -0.22159 0.29646 0.31699 0.00029278 7.276e-12 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 14 77 0 0.0016966 0.0033073 -2.6121e-09 5153.6 0.41456 0.97049 -0.63662 -0.00010204 -3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 15 55 0 0.013989 -0.003952 -2.5866e-09 5153.7 -0.30476 0.34521 0.16087 -6.9618e-05 3.638e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 16 56 0 0.012782 0.0085545 -2.5611e-09 5153.6 0.43073 0.23073 0.76066 -0.00049114 -3.638e-12 0 9
⋮
Get the satellite positions, velocities, and IDs at the first time step.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="SEM")satPos = 31×3
107 ×
1.3899 -2.2151 0.3074
-1.6755 0.5872 -1.9147
1.5377 -1.2781 -1.7528
0.6332 -1.6385 -1.9887
-2.5716 0.5413 0.4215
-1.0251 -1.1336 -2.1646
0.2694 -2.3585 1.1775
1.3414 -0.7139 2.1761
-0.3881 -2.2626 -1.3395
1.5043 1.1879 1.8656
-1.7866 0.4175 -1.9205
-1.9188 1.0246 -1.5421
-1.6711 -0.2575 2.0374
-1.3516 -1.3127 1.8746
-1.2509 0.9486 2.1022
⋮
satVel = 31×3
103 ×
0.0014 0.4854 3.2261
0.8625 -2.4217 -1.4348
2.2113 0.0321 1.9394
1.4081 2.1049 -1.2936
-0.5761 -0.2150 -3.1036
1.2999 -2.4327 0.6643
0.9229 -1.1620 -2.6758
1.5581 2.2893 -0.1743
1.1480 1.2668 -2.4877
-2.3150 0.2417 1.6982
1.1085 -2.1747 -1.5056
-1.9099 -0.2154 2.2852
-1.0411 -2.3996 -1.1323
2.3787 -0.1846 1.5773
-1.7983 -2.1160 -0.0817
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
⋮
Read GPS navigation message data from a YUMA almanac file.
data = yumaread("yumaAlmanac_2022-9-27.alm")data=31×13 timetable
Time PRN Health Eccentricity TimeOfApplicability OrbitalInclination RateOfRightAscen SQRTA RightAscenAtWeek ArgumentOfPerigee MeanAnom Af0 Af1 Week
____________________ ___ ______ ____________ ___________________ __________________ ________________ ______ ________________ _________________ ________ ___________ __________ ____
29-Sep-2022 16:38:06 1 0 0.012008 4.055e+05 0.98891 -7.5432e-09 5153.6 0.3651 0.9438 -1.095 0.00027561 -7.276e-12 2229
29-Sep-2022 16:38:06 2 0 0.02 4.055e+05 0.96685 -7.7946e-09 5154.9 0.27125 -1.393 -1.6195 -0.00064468 0 2229
29-Sep-2022 16:38:06 3 0 0.0044999 4.055e+05 0.97519 -7.726e-09 5153.5 1.3977 1.0651 -2.1966 -0.00035858 -3.638e-12 2229
29-Sep-2022 16:38:06 4 0 0.0020423 4.055e+05 0.96187 -7.966e-09 5153.7 2.4795 -3.1045 0.81839 -0.00011158 7.276e-12 2229
29-Sep-2022 16:38:06 5 0 0.0060811 4.055e+05 0.96224 -7.8403e-09 5153.7 1.3543 1.1188 1.415 -9.8228e-05 0 2229
29-Sep-2022 16:38:06 6 0 0.0024514 4.055e+05 0.98822 -7.5546e-09 5153.5 0.35683 -0.8974 -0.87447 0.00047684 1.0914e-11 2229
29-Sep-2022 16:38:06 7 0 0.016406 4.055e+05 0.95104 -7.7832e-09 5153.6 -2.7871 -2.2412 -1.7241 0.00030327 -3.638e-12 2229
29-Sep-2022 16:38:06 8 0 0.0075631 4.055e+05 0.96192 -8.2403e-09 5153.5 -0.71955 0.16395 1.1555 -8.6784e-05 0 2229
29-Sep-2022 16:38:06 9 0 0.0025387 4.055e+05 0.95495 -8.0575e-09 5153.7 2.4248 1.9083 1.5732 -0.00028992 3.638e-12 2229
29-Sep-2022 16:38:06 10 0 0.0079675 4.055e+05 0.97498 -7.7489e-09 5153.6 1.395 -2.5116 -3.0858 -5.722e-06 0 2229
29-Sep-2022 16:38:06 11 0 0.00075054 4.055e+05 0.96415 -7.7832e-09 5153.6 0.40358 -3.1036 0.81271 -2.0981e-05 -3.638e-12 2229
29-Sep-2022 16:38:06 12 0 0.0085082 4.055e+05 0.96755 -7.966e-09 5153.7 -1.6731 1.3158 -2.4318 -0.0002861 -7.276e-12 2229
29-Sep-2022 16:38:06 13 0 0.0065126 4.055e+05 0.96921 -7.8518e-09 5153.6 2.5812 0.94039 0.67456 0.00039673 7.276e-12 2229
29-Sep-2022 16:38:06 14 0 0.002305 4.055e+05 0.95095 -8.1261e-09 5153.6 -1.708 -3.0302 -2.4903 -0.00010014 3.638e-12 2229
29-Sep-2022 16:38:06 15 0 0.014625 4.055e+05 0.93093 -8.3203e-09 5153.6 2.3127 1.1401 0.17435 -2.4796e-05 3.638e-12 2229
29-Sep-2022 16:38:06 16 0 0.012809 4.055e+05 0.96738 -7.9889e-09 5153.7 -1.6547 0.73255 2.0697 -0.00052547 0 2229
⋮
Get the satellite positions, velocities, and IDs at the first time step.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="YUMA")satPos = 31×3
107 ×
-1.3549 2.2358 -0.3793
1.4926 -2.1942 -0.1952
-1.2477 1.2357 -2.0018
-0.4096 2.0385 -1.6467
2.2427 -0.7207 1.2218
1.4711 0.4089 -2.1680
-0.0841 2.0989 1.6373
-1.0615 1.1949 2.1111
0.5989 2.4816 -0.7333
-1.9686 -1.1518 1.4018
1.9842 -0.6457 -1.6411
1.3664 -1.1517 -1.9882
1.4721 -0.2873 2.1756
1.7638 1.3202 1.4920
0.9458 -1.3494 2.0339
⋮
satVel = 31×3
103 ×
-0.4388 0.2295 3.2113
0.0460 0.4065 -3.1646
-2.4900 -0.3576 1.3500
-0.9647 -1.8691 -2.0833
1.5583 0.3175 -2.6224
-1.6003 2.2475 -0.6531
-1.3741 1.5034 -2.0994
-1.2344 -2.3991 0.7711
-0.6518 -0.7124 -2.9785
1.7466 0.0160 2.4627
-1.1680 1.7362 -2.0987
2.4120 0.5344 1.3766
0.7821 2.6885 -0.1548
-1.9034 -0.0429 2.2785
1.5170 2.2368 0.7915
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
⋮
Read navigation data from a Galileo almanac file and use the navigation data to:
Get satellite positions, velocities, and IDs at a given timestamp.
Compute satellite visibility and look angles for a given receiver position by using the extracted satellite positions.
First, read GPS navigation message data from a Galileo almanac file.
filename = "galAlmanac_2019-08-06.xml";
data = galalmanacread(filename)data=22×16 timetable
Time SVID aSqRoot ecc deltai omega0 omegaDot w m0 af0 af1 iod t0a wna statusE5a statusE5b statusE1B
____________________ ____ ________ __________ __________ ________ ___________ ________ _________ ___________ ___________ ___ _________ ____ _________ _________ _________
06-Aug-2019 08:39:42 1 0.011719 0.00022888 0.0030518 -0.11984 -1.8626e-09 -0.81259 -0.053925 -0.00066185 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 2 0.017578 0.00010681 0.0030518 -0.11984 -1.8626e-09 -0.50497 0.63766 7.2479e-05 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 3 0.042969 0.00036621 -0.0076904 -0.78656 -1.7462e-09 -0.1449 0.94464 -0.00019646 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 4 0.039062 0.00027466 -0.0076904 -0.78653 -1.7462e-09 -0.40698 -0.041412 -0.00033951 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 5 0.042969 0.00021362 -0.0076904 -0.78656 -1.7462e-09 -0.33777 -0.61145 -0.00045967 3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 7 0.042969 0.00041199 -0.0076904 -0.78656 -1.7462e-09 -0.285 0.58496 -0.00024033 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 8 0.039062 0.00036621 -0.0057983 -0.789 -1.7462e-09 -0.19412 0.74414 0.0063114 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 9 0.039062 0.00045776 -0.0057983 -0.789 -1.7462e-09 -0.21506 -0.4855 0.0063572 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 11 0.017578 0.00038147 0.0021973 0.54333 -1.7462e-09 0.28098 -0.3125 0.0056324 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 12 0.015625 0.0002594 0.0021973 0.54333 -1.7462e-09 0.10056 0.12363 0.0062618 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 13 0.021484 1.5259e-05 0.0032349 0.54181 -1.7462e-09 0.23178 0.73837 0.00039101 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:29:42 15 0.017578 3.0518e-05 0.0032349 0.54178 -1.7462e-09 -0.60843 -0.19565 0.00090027 0 3 2.034e+05 1041 0 0 0
06-Aug-2019 08:39:42 19 0.027344 0.00024414 -0.0058594 -0.78732 -1.7462e-09 -0.47565 0.30069 -3.8147e-06 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 21 0.021484 0.00022888 0.0029297 -0.12067 -1.8626e-09 -0.91656 0.30164 -0.00054741 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 24 0.011719 0.00024414 0.0022583 -0.11884 -1.8626e-09 0.27414 0.35886 0.0059395 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 25 0.027344 0.00032043 0.0029297 -0.1207 -1.8626e-09 -0.7215 -0.89252 0.0017204 -1.0914e-11 4 2.04e+05 1041 0 0 0
⋮
Specify the timestamp for which to find the satellite positions, velocities, and IDs.
t = datetime(2021,06,24,01,59,44)
t = datetime
24-Jun-2021 01:59:44
Get the satellite positions, velocities, and IDs at the specified timestamp by using the gnssconstellation function.
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="galalmanac");Specify a receiver position in geodetic coordinates (latitude, longitude, altitude) to compute the satellite look angles and visibility.
recPos = [42.3013162 -71.3782972 0];
Specify the elevation mask angle for the receiver.
maskAngle = 5;
Compute the look angles and visibilities of satellite positions for the given receiver position. The vis output indicates which satellites are visible. Get the total using nnz.
[az,el,vis] = lookangles(recPos,satPos,maskAngle);
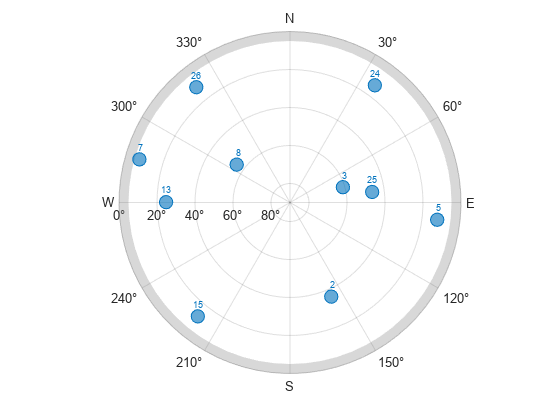
fprintf('%d satellites visible at %s.\n',nnz(vis),t)10 satellites visible at 24-Jun-2021 01:59:44.
Plot the visible satellite positions with the elevation mask.
figure skyplot(az(vis),el(vis),satID(vis),MaskElevation=maskAngle)
Input Arguments
Output Arguments
More About
References
[1] Groves, Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Boston: Artech House, 2013.
[2] International GNSS Service (IGS), Daily 30-Second GPS Broadcast Ephemeris Data, NASA Crustal Dynamics Data Information System (CDDIS), Greenbelt, MD, USA, Jun. 24, 2021. Accessed Jun. 25, 2021. https://dx.doi.org/10.5067/GNSS/gnss_daily_n_001.
[3] United States Coast Guard. "GPS Almanacs, NANUs, and OPS Advisories Archives." US Coast Guard Navigation Center. Accessed May 6, 2022. https://www.navcen.uscg.gov/archives.
[4] QZSS almanac archives, Quasi-Zenith Satellite System(QZSS). "QZSS (Quasi-Zenith Satellite System) - Cabinet Office (Japan)" Accessed September 20, 2022. https://sys.qzss.go.jp/dod/en/archives/pnt.html.
[5] European GNSS Service Centre (GSC). "Galileo Open Service Signal-In-Space Interface Control Document." Accessed March 13, 2023. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.1.pdf.
Extended Capabilities
Version History
Introduced in R2021aSee Also
Objects
Functions
skyplot|lookangles|pseudoranges|receiverposition|rinexread|rinexinfo|semread|yumaread|galalmanacread