interpolate
Interpolare i punti lungo il percorso
Sintassi
Descrizione
interpolate( inserisce un certo numero di stati nel percorso e garantisce che la distribuzione di tutti i punti del percorso sia uniforme. La funzione conserva tutti gli stati esistenti nel percorso. Il valore di path,numStates)numStates deve essere maggiore o uguale al numero di stati esistenti nel percorso.
Esempi
Crea un oggetto navPath basato su più waypoint in uno spazio Dubins.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi])
dubinsSpace =
stateSpaceDubins with properties:
SE2 Properties
Name: 'SE2 Dubins'
StateBounds: [3x2 double]
NumStateVariables: 3
Dubins Vehicle Properties
MinTurningRadius: 1
pathobj = navPath(dubinsSpace)
pathobj =
navPath with properties:
StateSpace: [1x1 stateSpaceDubins]
States: [0x3 double]
NumStates: 0
MaxNumStates: Inf
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
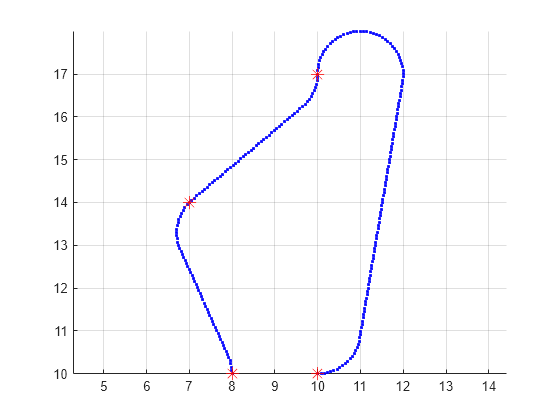
append(pathobj,waypoints)Interpolare quel percorso in modo che contenga esattamente 250 punti.
interpolate(pathobj,250)
Visualizza il percorso interpolato e i waypoint originali.
figure grid on axis equal hold on plot(pathobj.States(:,1),pathobj.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Calcola la lunghezza del percorso.
len = pathLength(pathobj);
disp("Path length = " + num2str(len))Path length = 19.4722
Caricare nell'area di lavoro una mappa 3D dell'occupazione di un isolato cittadino. Specificare la soglia per considerare le celle come prive di ostacoli.
mapData = load("dMapCityBlock.mat");
omap = mapData.omap;
omap.FreeThreshold = 0.5;Gonfiare la mappa di occupazione per aggiungere una zona cuscinetto per operazioni in sicurezza attorno agli ostacoli.
inflate(omap,1)
Creare un oggetto dello spazio di stato SE(3) con limiti per le variabili di stato.
ss = stateSpaceSE3([0 220;0 220;0 100;inf inf;inf inf;inf inf;inf inf]);
Crea un oggetto navPath basato su più waypoint in uno spazio di stato SE(3).
path = navPath(ss);
waypoints = [40 180 15 0.7 0.2 0 0.1;
55 120 20 0.6 0.2 0 0.1;
100 100 25 0.5 0.2 0 0.1;
130 90 30 0.4 0 0.1 0.6;
150 33 35 0.3 0 0.1 0.6];
append(path,waypoints)Interpolare quel percorso in modo che contenga esattamente 250 punti.
interpolate(path,250)
Visualizza il percorso interpolato e i waypoint originali.
show(omap) axis equal view([-10 55]) hold on % Start state scatter3(waypoints(1,1),waypoints(1,2),waypoints(1,3),"g","filled") % Goal state scatter3(waypoints(end,1),waypoints(end,2),waypoints(end,3),"r","filled") % Intermediate waypoints scatter3(waypoints(2:end-1,1),waypoints(2:end-1,2), ... waypoints(2:end-1,3),"y","filled") % Path plot3(path.States(:,1),path.States(:,2),path.States(:,3), ... "r-",LineWidth=2)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 5 objects of type patch, scatter, line.](createnavpathbasedonmultiplewaypointsinse3statespaceexample_01_it.png)
Calcola la lunghezza del percorso.
len = pathLength(path);
disp("Path length = " + num2str(len))Path length = 204.1797
Argomenti di input
Funzionalità estese
Cronologia versioni
Introdotto in R2019b