occupancyMap3D
Crea una mappa di occupazione 3D
Descrizione
L'oggetto occupancyMap3D memorizza una mappa 3D e informazioni sulla mappa. La mappa viene memorizzata sotto forma di valori probabilistici in una struttura dati octree. La classe gestisce ambienti arbitrari e amplia dinamicamente le sue dimensioni in base agli input di osservazione. È possibile aggiungere osservazioni come nuvole di punti o come posizioni xyz specifiche. Queste osservazioni aggiornano i valori di probabilità. I valori probabilistici rappresentano l'occupazione delle posizioni. La struttura dati octree riduce opportunamente i dati per mantenerli efficienti sia in memoria che su disco.
Creazione
Descrizione
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution.
omap = occupancyMap3D(res,Name,Value)"FreeThreshold",0.25 imposta la soglia per considerare le celle prive di ostacoli come un valore di probabilità pari a 0,25.
Proprietà
Funzioni oggetto
checkOccupancy | Check if locations are free or occupied |
getOccupancy | Get occupancy probability of locations |
inflate | Inflate each occupied location |
insertPointCloud | Insert 3-D points or point cloud observation into map |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | Set occupancy probability of locations |
show | Display 3-D occupancy map |
updateOccupancy | Update occupancy probability at locations |
Esempi
L'oggetto occupancyMap3D memorizza gli ostacoli nello spazio 3D, utilizzando le osservazioni dei sensori per mappare un ambiente. Crea una mappa e aggiungi punti da una nuvola di punti per identificare gli ostacoli. Quindi gonfiare gli ostacoli sulla mappa per garantire uno spazio operativo sicuro attorno agli ostacoli.
Crea un oggetto occupancyMap3D con una risoluzione della mappa di 10 celle/metro.
map3D = occupancyMap3D(10);
Definire un insieme di punti 3D come un'osservazione da una posa [x y z qw qx qy qz] . Questa posa è per il sensore che osserva questi punti ed è centrato sull'origine. Definire due serie di punti per inserire più osservazioni.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Inserire il primo set di punti utilizzando insertPointCloud . La funzione utilizza la posizione del sensore e i punti forniti per inserire osservazioni nella mappa. I colori visualizzati corrispondono all'altezza del punto solo a scopo illustrativo.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](create3doccupancymapandinflatepointsexample_01_it.png)
Inserire la seconda serie di punti. Il raggio tra la posa del sensore (origine) e questi punti si sovrappone ai punti dell'inserimento precedente. Pertanto, lo spazio libero tra il sensore e i nuovi punti viene aggiornato e contrassegnato come spazio libero.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](create3doccupancymapandinflatepointsexample_02_it.png)
Gonfiare la mappa per aggiungere una zona cuscinetto per operare in sicurezza attorno agli ostacoli. Definire il raggio del veicolo e la distanza di sicurezza e utilizzare la somma di questi valori per definire il raggio di gonfiaggio della mappa.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](create3doccupancymapandinflatepointsexample_03_it.png)
Algoritmi
La struttura dati octree è una struttura gerarchica utilizzata per la suddivisione di un ambiente in volumi cubici denominati voxel. Per un dato volume di mappa, lo spazio viene suddiviso ricorsivamente in otto voxel fino a raggiungere la risoluzione di mappa desiderata (dimensione del voxel). Questa suddivisione può essere rappresentata come un albero, che memorizza i valori di probabilità per le posizioni sulla mappa.
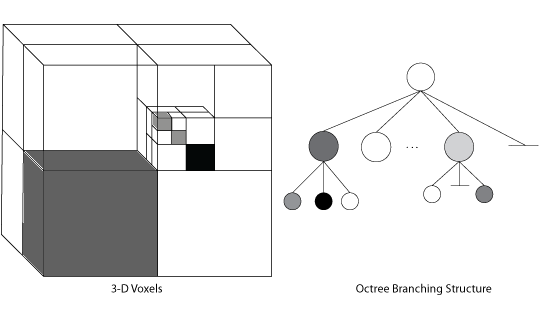
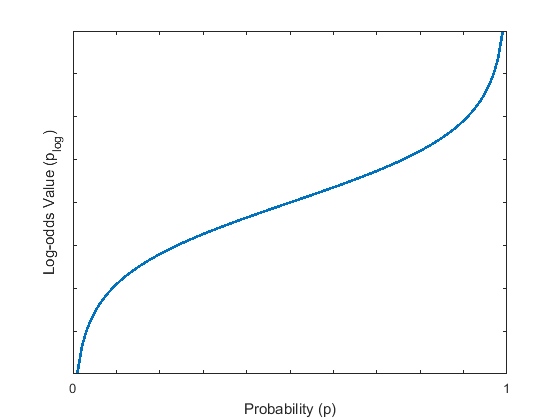
I valori di probabilità nell'albero hanno una rappresentazione logaritmica. Questa rappresentazione consente di recuperare facilmente le posizioni dalle osservazioni dinamiche e riduce gli errori numerici dovuti a piccole probabilità. Per mantenere l'efficienza della memoria, i rami inferiori dell'albero vengono potati nella struttura se condividono gli stessi valori di occupazione utilizzando questa rappresentazione logaritmica.
L'oggetto gestisce internamente l'organizzazione di questa struttura dati, inclusa la potatura dei rami. Quando si utilizzano funzioni come setOccupancy, getOccupancy o insertPointCloud, specificare tutte le osservazioni come coordinate spaziali. L'oggetto determina gli inserimenti nell'albero e la navigazione attraverso l'albero in base alle coordinate spaziali e alla risoluzione della mappa.
Riferimenti
[1] Hornung, Armin, Kai M. Wurm, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard. "OctoMap: an efficient probabilistic 3D mapping framework based on octrees." Autonomous Robots 34, no. 3 (April 2013): 189–206. https://doi.org/10.1007/s10514-012-9321-0.
Funzionalità estese
Cronologia versioni
Introdotto in R2019b
Vedi anche
Oggetti
Funzioni
checkMapCollision|insertPointCloud|inflate|setOccupancy|show|rosReadOccupancyMap3D(ROS Toolbox)