Loop Shaping
In loop-shaping controller synthesis, you specify the shape of the open-loop response you want, and use a loop-shaping function to compute a controller that approximates that shape.
Most controller designs involve a tradeoff between performance and
robustness against uncertainty. Robust Control Toolbox™ commands for loop-shaping controller design let you
determine the tradeoff that best meets the requirements of your system.
loopsyn lets you adjust
the balance between performance and robustness. ncfsyn focuses on
robust stability, while mixsyn focuses on
performance.
Functions
loopsyn | Loop-shaping controller design with tradeoff between performance and robustness |
ncfsyn | Loop shaping design using Glover-McFarlane method |
mixsyn | Mixed-sensitivity H∞ synthesis method for robust control loop-shaping design |
makeweight | Weighting function with monotonic gain profile |
mkfilter | Generate Bessel, Butterworth, Chebyshev, or RC filter as an ss
model |
augw | Plant augmentation for weighted mixed-sensitivity H∞ and H2 loop-shaping design |
Topics
- Loop Shaping for Performance and Robustness
Loop shaping is an approach to control design in which you determine a suitable profile for the open-loop system response and design a controller to achieve that shape.
- Loop-Shaping Controller Design
Compute a controller for a MIMO model of an aircraft using
loopsyn. Adjust the balance between performance and robustness to obtain satisfactory responses while avoiding fragile designs. - Mixed-Sensitivity Loop Shaping
Mixed-sensitivity loop shaping combines specifications for both performance and stability into one cost function that penalizes both sensitivity and complementary sensitivity.
- Loop Shaping Using the Glover-McFarlane Method
Use
ncfsynto shape the open-loop response while enforcing stability and maximizing robustness.
Featured Examples
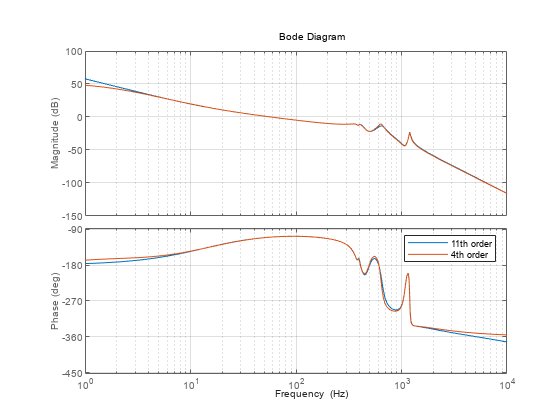
Robust Loop Shaping of Nanopositioning Control System
Use ncfsyn to obtain a loop-shaping compensator with good stability margins for a nanopositioning stage.