modalfrf
Frequency-response functions for modal analysis
Syntax
Description
frf = modalfrf(x,y,fs,window)frf,
from the excitation signals, x, and the response signals,
y, all sampled at a rate fs. The
output, frf, is an H1 estimate computed using Welch’s method with
window to window the signals. x
and y must have the same number of rows. If
x or y is a matrix, each column
represents a signal.
The system response, y, is assumed to contain
acceleration measurements. To compute a frequency-response function starting
from displacement or velocity measurements, use the 'Sensor' argument.
modalfrf always outputs the frequency-response
function in dynamic flexibility (receptance) format irrespective of the sensor
type.
frf = modalfrf(___,Name,Value)
[
computes the frequency-response function of the identified model
frf,f] = modalfrf(sys)sys. Use estimation commands like ssest (System Identification Toolbox), n4sid (System Identification Toolbox), or tfest (System Identification Toolbox) to create
sys from time-domain input and output signals. This
syntax allows use only of the 'Sensor' name-value argument.
You must have a System Identification Toolbox™ license to use this syntax.
modalfrf(___) with no output
arguments plots the frequency response functions in the current figure.
The plots are limited to the first four excitations and four responses.
Examples
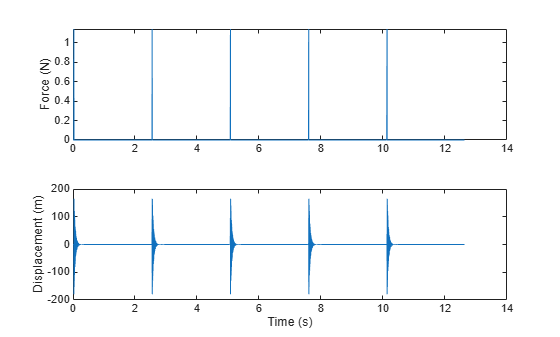
Visualize the frequency-response function of a single-input/single-output hammer excitation.
Load a data file that contains:
XhammerAn input excitation signal consisting of five hammer blows delivered periodically.YhammerThe response of a system to the input.Yhammeris measured as a displacement.
The signals are sampled at 4 kHz. Plot the excitation and output signals.
load modaldata subplot(2,1,1) plot(thammer,Xhammer(:)) ylabel('Force (N)') subplot(2,1,2) plot(thammer,Yhammer(:)) ylabel('Displacement (m)') xlabel('Time (s)')
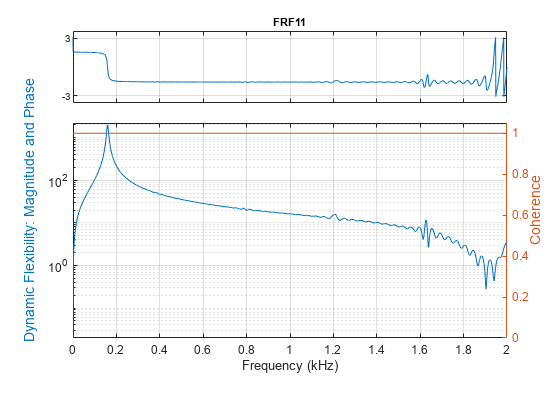
Compute and display the frequency-response function. Window the signals using a rectangular window. Specify that the window covers the period between hammer blows.
clf winlen = size(Xhammer,1); modalfrf(Xhammer(:),Yhammer(:),fs,winlen,'Sensor','dis')
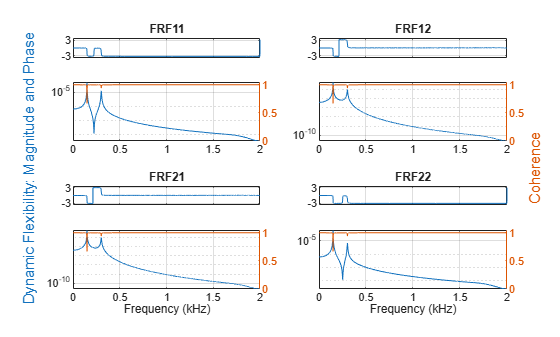
Compute the frequency-response functions for a two-input/two-output system excited by random noise.
Load a data file that contains Xrand, the input excitation signal, and Yrand, the system response. Compute the frequency-response functions using a 5000-sample Hann window and 50% overlap between adjoining data segments. Specify that the output measurements are displacements.
load modaldata winlen = 5000; frf = modalfrf(Xrand,Yrand,fs,hann(winlen),0.5*winlen,'Sensor','dis');
Use the plotting functionality of modalfrf to visualize the responses.
modalfrf(Xrand,Yrand,fs,hann(winlen),0.5*winlen,'Sensor','dis')
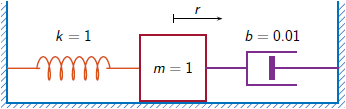
Estimate the frequency-response function for a simple single-input/single-output system and compare it to the definition.
A one-dimensional discrete-time oscillating system consists of a unit mass, (in kg), attached to a wall by a spring with elastic constant N/m. A sensor samples the displacement of the mass at Hz. A damper impedes the motion of the mass by exerting on it a force proportional to speed, with damping constant kg/s.
Generate 3000 time samples. Define the sampling interval .
Fs = 1; dt = 1/Fs; N = 3000; t = dt*(0:N-1); b = 0.01;
The system can be described by the state-space model
where is the state vector, and are respectively the displacement and velocity of the mass, is the driving force, and is the measured output. The state-space matrices are
is the identity, and the continuous-time state-space matrices are
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(2))*Bc; C = [1 0]; D = 0;
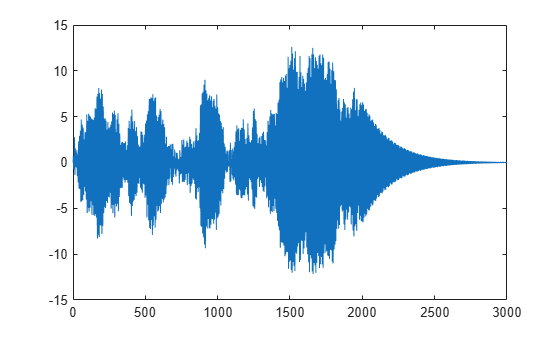
The mass is driven by random input for the first 2000 seconds and then left to return to rest. Use the state-space model to compute the time evolution of the system starting from an all-zero initial state. Plot the displacement of the mass as a function of time.
rng("default") u = randn(1,N)/2; u(2001:end) = 0; y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)
Estimate the modal frequency-response function of the system. Use a Hann window half as long as the measured signals. Specify that the output is the displacement of the mass.
wind = hann(N/2);
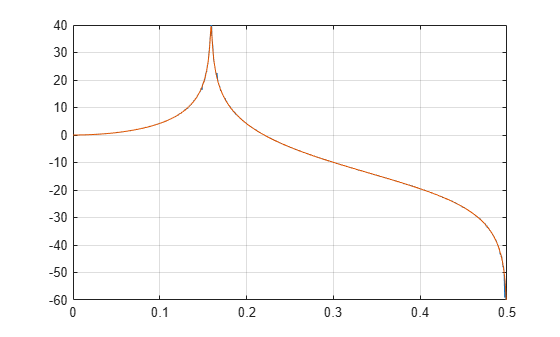
[frf,f] = modalfrf(u',y',Fs,wind,Sensor="dis");The frequency-response function of a discrete-time system can be expressed as the Z-transform of the time-domain transfer function of the system, evaluated at the unit circle. Compare the modalfrf estimate with the definition.
[b,a] = ss2tf(A,B,C,D); [ztf,fz] = freqz(b,a,2048,Fs); plot(f,mag2db(abs(frf))) hold on plot(fz*Fs,mag2db(abs(ztf))) hold off grid ylim([-60 40])
Estimate the natural frequency and the damping ratio for the vibration mode.
[fn,dr] = modalfit(frf,f,Fs,1,FitMethod="PP")fn = 0.1593
dr = 0.0043
Compare the natural frequency to , which is the theoretical value for the undamped system.
theo = 1/(2*pi)
theo = 0.1592
Estimate the frequency-response function of a multi-input/multi-output (MIMO) system.
Two masses connected to a spring and a damper on each side form an ideal one-dimensional discrete-time oscillating system. The system input array u consists of random driving forces applied to the masses. The system output array y contains the observed displacements of the masses from their initial reference positions. The system is sampled at a rate Fs of 40 Hz.

Load the data file containing the MIMO system inputs, the system outputs, and the sample rate. The example Frequency-Response Analysis of MIMO System analyzes the system that generated the data used in this example.
load MIMOdataEstimate and plot the modal frequency response functions of the system. Use a 12000-sample Hann window with 9000 samples of overlap between adjoining segments. Specify the sensor data type as measured displacements.
wind = hann(12000); nove = 9000; [frf,f] = modalfrf(u,y,Fs,wind,nove,Sensor="dis"); tiledlayout flow for jk = 1:2 for kj = 1:2 nexttile plot(f,mag2db(abs(frf(:,jk,kj)))) grid on axis([0 Fs/2 -100 0]) title("Input "+jk+", Output "+kj) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") end end

Compute the frequency-response function of a two-input/six-output data set corresponding to a steel frame.
Load a structure containing the input excitations and the output accelerometer measurements. The system is sampled at 1024 Hz for about 3.9 seconds.
load modaldata SteelFrame X = SteelFrame.Input; Y = SteelFrame.Output; fs = SteelFrame.Fs;
Use the subspace method to compute the frequency-response functions. Divide the input and output signals into nonoverlapping, 1000-sample segments. Window each segment using a rectangular window. Specify a model order of 36.
[frf,f] = modalfrf(X,Y,fs,1000,'Estimator','subspace','Order',36);
Visualize the stabilization diagram for the system. Identify up to 15 physical modes.
modalsd(frf,f,fs,'MaxModes',15)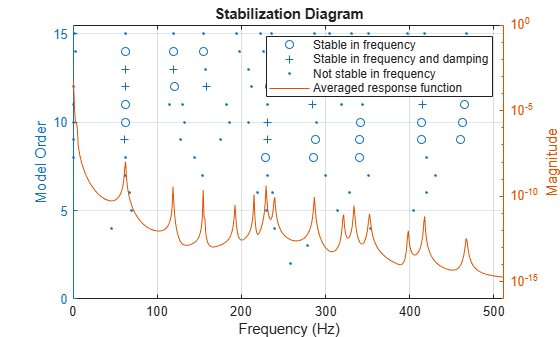
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: "Sensor","vel","Estimator","H1" specifies that the input signal
consists of velocity measurements and that the estimator of choice is
H1.
Estimator, specified as "H1", "H2",
"Hv", or "subspace". See Transfer Function for more information about the H1 and H2 estimators.
Use
"H1"when the noise is uncorrelated with the excitation signals.Use
"H2"when the noise is uncorrelated with the response signals. In this case, the number of excitation signals must equal the number of response signals.Use
"Hv"to minimize the discrepancy between modeled and estimated response data by minimizing the trace of the error matrix. Hv is the geometric mean of H1 and H2: Hv = (H1H2)1/2The measurement must be single-input/single-output (SISO).
Use
"subspace"to compute the frequency-response functions using a state-space model. In this case, thenoverlapargument is ignored. This method typically requires less data than nonparametric approaches. Seen4sid(System Identification Toolbox) for more information.
Presence of feedthrough in state-space model, specified as a logical
value. This argument is available only if 'Estimator'
is specified as "subspace".
Data Types: logical
Measurement configuration for equal numbers of excitation and response
channels, specified as "fixed",
"rovinginput", or
"rovingoutput".
Use
"fixed"when there are excitation sources and sensors at fixed locations of the system. Each excitation contributes to every response.Use
"rovinginput"when the measurements result from a roving excitation (or roving hammer) test. A single sensor is kept at a fixed location of the system. A single excitation source is placed at multiple locations and produces one sensor response per location. The function outputfrf(:,:,i) = modalfrf(x(:,i),y(:,i)).Use
"rovingoutput"when the measurements result from a roving sensor test. A single excitation source is kept at a fixed location of the system. A single sensor is placed at multiple locations and responds to one excitation per location. The function outputfrf(:,i) = modalfrf(x(:,i),y(:,i)).
State-space model order, specified as an integer or row vector of
integers. If you specify a vector of integers, then the function selects
an optimal order value from the specified range. This argument is
available only if 'Estimator' is specified as
"subspace".
Data Types: single | double
Sensor type, specified as "acc", "vel", or
"dis".
"acc"— Specifies that the response signal of the system is proportional to acceleration."vel"— Specifies that the response signal of the system is proportional to velocity."dis"— Specifies that the response signal of the system is proportional to displacement.
modalfrf always outputs the
frequency-response function in dynamic flexibility (receptance) format
irrespective of the sensor type.
Example: Undamped Harmonic Oscillator
The motion of a simple undamped harmonic oscillator of unit mass and elastic constant sampled at a rate is described by the transfer function
,
where the numerator depends on the magnitude being measured:
Displacement:
Velocity:
Acceleration:
Compute the frequency-response function for the three possible system response sensor types. Use a sample rate of 2 Hz and 30,000 samples of white noise as input.
fs = 2; dt = 1/fs; N = 30000; u = randn(N,1); ydis = filter((1-cos(dt))*[0 1 1],[1 -2*cos(dt) 1],u); [frfd,fd] = modalfrf(u,ydis,fs,hann(N/2),Sensor="dis"); yvel = filter(sin(dt)*[0 1 -1],[1 -2*cos(dt) 1],u); [frfv,fv] = modalfrf(u,yvel,fs,hann(N/2),Sensor="vel"); yacc = filter([1 -(1+cos(dt)) cos(dt)],[1 -2*cos(dt) 1],u); [frfa,fa] = modalfrf(u,yacc,fs,hann(N/2),Sensor="acc"); loglog(fd,abs(frfd),fv,abs(frfv),fa,abs(frfa)) grid legend(["dis" "vel" "acc"],Location="best")

In all cases, the generated frequency-response function is in a format corresponding to displacement. Velocity and acceleration measurements are first and second time derivatives, respectively, of displacement measurements. The frequency-response functions are equivalent in the range around the natural frequency of the system. Away from the natural frequency, the frequency-response functions differ.
Output Arguments
References
[1] "Dynamic Stiffness, Compliance, Mobility, and more..." Siemens, last modified 2019, https://community.sw.siemens.com/s/article/dynamic-stiffness-compliance-mobility-and-more.
[2] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[3] Irvine, Tom. "An Introduction to Frequency Response Functions," Vibrationdata, 2000, https://vibrationdata.com/tutorials2/frf.pdf.
[4] Vold, Håvard, John Crowley, and G. Thomas Rocklin. "New Ways of Estimating Frequency Response Functions." Sound and Vibration. Vol. 18, November 1984, pp. 34–38.
Extended Capabilities
Version History
Introduced in R2017aSee Also
modalfit | modalsd | n4sid (System Identification Toolbox) | tfestimate
Topics
- Modal Analysis of Identified Models
- System Identification Overview (System Identification Toolbox)
- System Identification Workflow (System Identification Toolbox)
- Supported Continuous- and Discrete-Time Models (System Identification Toolbox)