modalfit
Modal parameters from frequency-response functions
Syntax
Description
fn = modalfit(frf,f,fs,mnum)mnum modes of a system with
measured frequency-response functions frf defined at frequencies
f and for a sample rate fs. Use
modalfrf to generate a matrix of
frequency-response functions from measured data. frf is assumed
to be in dynamic flexibility (receptance) format.
[___] = modalfit(
estimates the modal parameters of the identified model sys,f,mnum,Name,Value)sys. Use
estimation commands like ssest (System Identification Toolbox) or tfest (System Identification Toolbox) to create sys starting from a measured
frequency-response function or from time-domain input and output signals. This syntax
allows use of the 'DriveIndex',
'FreqRange', and 'PhysFreq' name-value
arguments. It typically requires less data than syntaxes that use nonparametric
methods. You must have a System Identification Toolbox™ license to use this syntax.
Examples
Estimate the frequency-response function for a simple single-input/single-output system and compare it to the definition.
A one-dimensional discrete-time oscillating system consists of a unit mass, (in kg), attached to a wall by a spring with elastic constant N/m. A sensor samples the displacement of the mass at Hz. A damper impedes the motion of the mass by exerting on it a force proportional to speed, with damping constant kg/s.
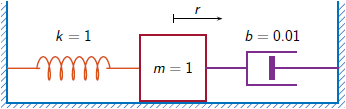
Generate 3000 time samples. Define the sampling interval .
Fs = 1; dt = 1/Fs; N = 3000; t = dt*(0:N-1); b = 0.01;
The system can be described by the state-space model
where is the state vector, and are respectively the displacement and velocity of the mass, is the driving force, and is the measured output. The state-space matrices are
is the identity, and the continuous-time state-space matrices are
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(2))*Bc; C = [1 0]; D = 0;
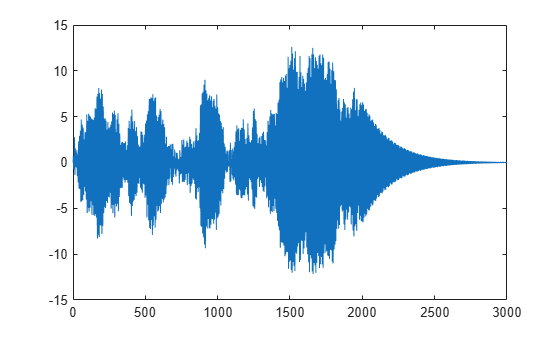
The mass is driven by random input for the first 2000 seconds and then left to return to rest. Use the state-space model to compute the time evolution of the system starting from an all-zero initial state. Plot the displacement of the mass as a function of time.
rng("default") u = randn(1,N)/2; u(2001:end) = 0; y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)
Estimate the modal frequency-response function of the system. Use a Hann window half as long as the measured signals. Specify that the output is the displacement of the mass.
wind = hann(N/2);
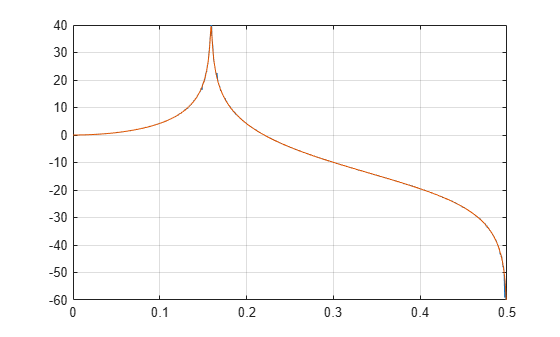
[frf,f] = modalfrf(u',y',Fs,wind,Sensor="dis");The frequency-response function of a discrete-time system can be expressed as the Z-transform of the time-domain transfer function of the system, evaluated at the unit circle. Compare the modalfrf estimate with the definition.
[b,a] = ss2tf(A,B,C,D); [ztf,fz] = freqz(b,a,2048,Fs); plot(f,mag2db(abs(frf))) hold on plot(fz*Fs,mag2db(abs(ztf))) hold off grid ylim([-60 40])
Estimate the natural frequency and the damping ratio for the vibration mode.
[fn,dr] = modalfit(frf,f,Fs,1,FitMethod="PP")fn = 0.1593
dr = 0.0043
Compare the natural frequency to , which is the theoretical value for the undamped system.
theo = 1/(2*pi)
theo = 0.1592
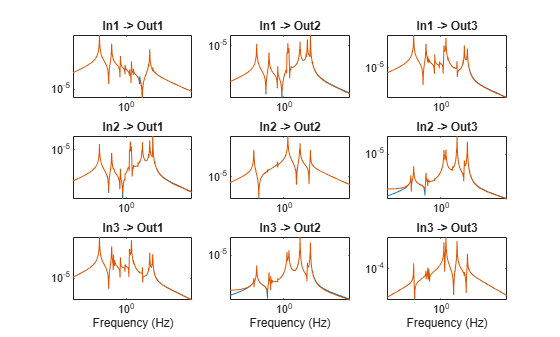
Compute the modal parameters of a Space Station module starting from its frequency-response function (FRF) array.
Load a structure containing the three-input/three-output FRF array. The system is sampled at 320 Hz.
load modaldata SpaceStationFRF frf = SpaceStationFRF.FRF; f = SpaceStationFRF.f; fs = SpaceStationFRF.Fs;
Extract the modal parameters of the lowest 24 modes using the least-squares rational function method.
[fn,dr,ms,ofrf] = modalfit(frf,f,fs,24,'FitMethod','lsrf');
Compare the reconstructed FRF array to the measured one.
for ij = 1:3 for ji = 1:3 subplot(3,3,3*(ij-1)+ji) loglog(f,abs(frf(:,ji,ij))) hold on loglog(f,abs(ofrf(:,ji,ij))) hold off axis tight title(sprintf('In%d -> Out%d',ij,ji)) if ij==3 xlabel('Frequency (Hz)') end end end
Estimate the modal parameters of a multi-input/multi-output (MIMO) system.
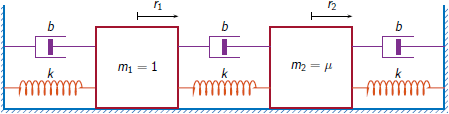
Two masses connected to a spring and a damper on each side form an ideal one-dimensional discrete-time oscillating system. The system input array u consists of random driving forces applied to the masses. The system output array y contains the observed displacements of the masses from their initial reference positions. The system is sampled at a rate Fs of 40 Hz.
Load the data file containing the MIMO system inputs, the system outputs, and the sample rate. The example Frequency-Response Analysis of MIMO System analyzes the system that generated the data used in this example.
load MIMOdataEstimate the modal frequency response functions of the system. Use a 12000-sample Hann window with 9000 samples of overlap between adjoining segments. Specify the sensor data type as measured displacements.
wind = hann(12000);
nove = 9000;
[frf,f] = modalfrf(u,y,Fs,wind,nove,Sensor="dis");Estimate the natural frequencies, damping ratios, and mode shapes of the system. Use two modes and pick the least-squares rational function estimation method for the calculation.
[fn,dr,ms] = modalfit(frf,f,Fs,2,FitMethod="lsrf")fn = 2×1
3.8412
3.8477
dr = 2×1
0.0003
0.0030
ms = 2×2 complex
0.0173 - 0.0014i 0.0804 - 0.1146i
0.0093 - 0.0008i 0.0434 - 0.0618i
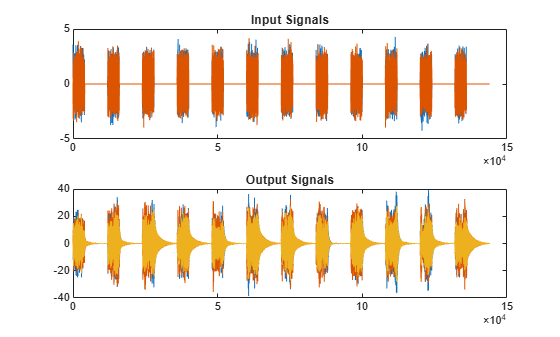
Compute the natural frequencies, the damping ratios, and the mode shapes for a two-input/three-output system excited by several bursts of random noise. Each burst lasts for 1 second, and there are 2 seconds between the end of each burst and the start of the next. The data are sampled at 4 kHz.
Load the data file. Plot the input signals and the output signals.
load modaldata subplot(2,1,1) plot(Xburst) title('Input Signals') subplot(2,1,2) plot(Yburst) title('Output Signals')
Compute the frequency-response functions. Specify a rectangular window with length equal to the burst period and no overlap between adjoining segments.
burstLen = 12000; [frf,f] = modalfrf(Xburst,Yburst,fs,burstLen);
Visualize a stabilization diagram and return the stable natural frequencies. Specify a maximum model order of 30 modes.
figure
modalsd(frf,f,fs,'MaxModes',30);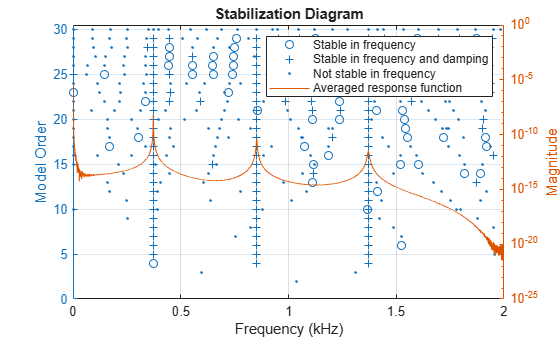
Zoom in on the plot. The averaged response function has maxima at 373 Hz, 852 Hz, and 1371 Hz, which correspond to the physical frequencies of the system. Save the maxima to a variable.
phfr = [373 852 1371];
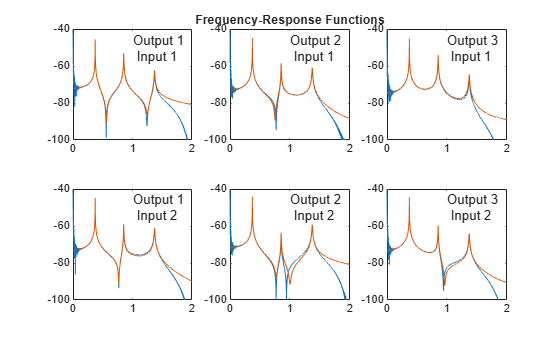
Compute the modal parameters using the least-squares complex exponential (LSCE) algorithm. Specify a model order of 6 modes and specify physical frequencies for the 3 modes determined from the stabilization diagram. The function generates one set of natural frequencies and damping ratios for each input reference.
[fn,dr,ms,ofrf] = modalfit(frf,f,fs,6,'PhysFreq',phfr);Plot the reconstructed frequency-response functions and compare them to the original ones.
for k = 1:2 for m = 1:3 subplot(2,3,m+3*(k-1)) plot(f/1000,10*log10(abs(frf(:,m,k)))) hold on plot(f/1000,10*log10(abs(ofrf(:,m,k)))) hold off text(1,-50,[['Output ';' Input '] num2str([m k]')]) ylim([-100 -40]) end end subplot(2,3,2) title('Frequency-Response Functions')
Input Arguments
Frequency-response functions, specified as a vector, matrix, or 3-D array.
frf has size
p-by-m-by-n, where
p is the number of frequency bins, m is
the number of response signals, and n is the number of
excitation signals used to estimate the transfer function.
frf is assumed to be in dynamic flexibility (receptance)
format.
Use modalfrf to generate a matrix of
frequency-response functions from measured data.
Example: Undamped Harmonic Oscillator
The motion of a simple undamped harmonic oscillator of unit mass and elastic constant sampled at a rate is described by the transfer function
,
where the numerator depends on the magnitude being measured:
Displacement:
Velocity:
Acceleration:
Compute the frequency-response function for the three possible system response sensor types. Use a sample rate of 2 Hz and 30,000 samples of white noise as input.
fs = 2; dt = 1/fs; N = 30000; u = randn(N,1); ydis = filter((1-cos(dt))*[0 1 1],[1 -2*cos(dt) 1],u); [frfd,fd] = modalfrf(u,ydis,fs,hann(N/2),Sensor="dis"); yvel = filter(sin(dt)*[0 1 -1],[1 -2*cos(dt) 1],u); [frfv,fv] = modalfrf(u,yvel,fs,hann(N/2),Sensor="vel"); yacc = filter([1 -(1+cos(dt)) cos(dt)],[1 -2*cos(dt) 1],u); [frfa,fa] = modalfrf(u,yacc,fs,hann(N/2),Sensor="acc"); loglog(fd,abs(frfd),fv,abs(frfv),fa,abs(frfa)) grid legend(["dis" "vel" "acc"],Location="best")

In all cases, the generated frequency-response function is in a format corresponding to displacement. Velocity and acceleration measurements are first and second time derivatives, respectively, of displacement measurements. The frequency-response functions are equivalent in the range around the natural frequency of the system. Away from the natural frequency, the frequency-response functions differ.
Data Types: single | double
Complex Number Support: Yes
Frequencies, specified as a vector. The number of elements of f must
equal the number of rows of frf.
Data Types: single | double
Sample rate of measurement data, specified as a positive scalar expressed in hertz.
Data Types: single | double
Number of modes, specified as a positive integer.
Data Types: single | double
Identified system, specified as a model with identified parameters. Use
estimation commands like ssest (System Identification Toolbox), n4sid (System Identification Toolbox), or tfest (System Identification Toolbox) to create
sys starting from a measured frequency-response function
or from time-domain input and output signals. See Modal Analysis of Identified Models for an
example. You must have a System Identification Toolbox license to use this input argument.
Example: idss([0.5418 0.8373;-0.8373 0.5334],[0.4852;0.8373],[1
0],0,[0;0],[0;0],1) generates an identified state-space model
corresponding to a unit mass attached to a wall by a spring of unit elastic
constant and a damper with constant 0.01. The displacement of the mass is sampled
at 1 Hz.
Example: idtf([0 0.4582 0.4566],[1 -1.0752 0.99],1) generates
an identified transfer-function model corresponding to a unit mass attached to a
wall by a spring of unit elastic constant and a damper with constant 0.01. The
displacement of the mass is sampled at 1 Hz.
Name-Value Arguments
Output Arguments
Algorithms
References
[1] Allemang, Randall J., and David L. Brown. “Experimental Modal Analysis and Dynamic Component Synthesis, Vol. III: Modal Parameter Estimation.” Technical Report AFWAL-TR-87-3069. Air Force Wright Aeronautical Laboratories, Wright-Patterson Air Force Base, OH, December 1987.
[2] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[3] Ozdemir, Ahmet Arda, and Suat Gumussoy. "Transfer Function Estimation in System Identification Toolbox via Vector Fitting." Proceedings of the 20th World Congress of the International Federation of Automatic Control, Toulouse, France, July 2017.
Extended Capabilities
Version History
Introduced in R2017aSee Also
modalfrf | modalsd | n4sid (System Identification Toolbox) | tfest (System Identification Toolbox) | tfestimate
Topics
- Modal Analysis of Identified Models
- System Identification Overview (System Identification Toolbox)
- System Identification Workflow (System Identification Toolbox)
- Supported Continuous- and Discrete-Time Models (System Identification Toolbox)