Sospensioni automotive
Questo esempio mostra come modellare un sistema semplificato di mezza automobile che include sospensioni verticali anteriori e posteriori indipendenti. Il modello incorpora anche i gradi di libertà di beccheggio e rimbalzo della carrozzeria. L'esempio fornisce una descrizione del modello per dimostrare come la simulazione possa essere utilizzata per esaminare le caratteristiche di guida. È possibile utilizzare questo modello insieme a una simulazione del gruppo propulsore per studiare lo slittamento longitudinale derivante dalle variazioni dell'impostazione dell'acceleratore.
Analisi e fisica

L'illustrazione mostra le caratteristiche modellate della mezza automobile. Le sospensioni anteriori e posteriori sono modellate come sistemi molla/ammortizzatore. Un modello più dettagliato includerebbe un modello di pneumatico e le non linearità degli ammortizzatori, come lo smorzamento dipendente dalla velocità (con uno smorzamento maggiore durante il rimbalzo rispetto alla compressione). La carrozzeria del veicolo presenta gradi di libertà di beccheggio e di rimbalzo, rappresentati nel modello da quattro stati: spostamento verticale, velocità verticale, spostamento angolare di beccheggio e velocità angolare di beccheggio. È possibile implementare un modello completo con sei gradi di libertà utilizzando blocchi di algebra vettoriale per eseguire trasformazioni degli assi e calcoli relativi a forza, spostamento e velocità.
L'equazione 1 descrive l'influenza della sospensione anteriore sul rimbalzo (ossia il grado di libertà verticale):

dove:







Le equazioni 2 descrivono i momenti di beccheggio dovuti alla sospensione.



dove:

Le equazioni 3 risolvono le forze e i momenti che determinano il movimento della carrozzeria, secondo la seconda legge di Newton:


dove:



Modello
Aprire il modello.
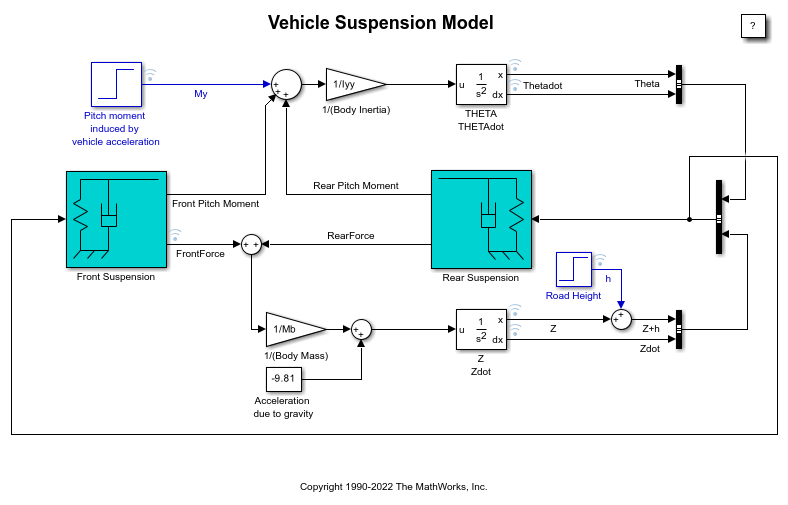
Il modello di sospensione ha due input ed entrambi i blocchi di input sono blu sul diagramma del modello. Il primo input è l'altezza della strada. Un input a gradino in questo punto corrisponde al veicolo che percorre una superficie stradale con un dislivello improvviso. Il secondo input è una forza orizzontale che agisce attraverso il centro delle ruote, derivante da manovre di frenata o di accelerazione. Questo input appare solo come momento sull'asse di beccheggio perché il movimento longitudinale della carrozzeria non è modellato.

Il sottosistema molla/ammortizzatore che modella le sospensioni anteriori e posteriori è mostrato qui sopra. Fare clic con il tasto destro del mouse sul blocco Front Suspension o Rear Suspension. Selezionare Edit Mask > Look Under Mask (Modifica maschera > Cerca sotto la maschera) per visualizzare il sottosistema delle sospensioni anteriori o posteriori. I sottosistemi delle sospensioni modellano le equazioni 1-3. Il diagramma di Simulink® utilizza i blocchi Gain e Summation per implementare le equazioni 1-3.
Le differenze tra le sospensioni anteriori e quelle posteriori sono determinate come segue. Poiché il sottosistema è un blocco mascherato, è possibile inserire un insieme di dati diverso (L, K e C) per ciascuna istanza. Inoltre, L è considerato come la coordinata cartesiana x, essendo negativa o positiva rispetto all'origine o al centro di gravità. Pertanto, Kf, Cf e -Lf si utilizzano per il blocco Front Suspension, mentre Kr, Cr e Lr si utilizzano per il blocco Rear Suspension.
Eseguire una simulazione
Per eseguire questo modello, nella scheda Simulation (Simulazione), fare clic su Run (Esegui). Le condizioni iniziali vengono caricate nel workspace del modello dal file sldemo_suspdat.m. Per visualizzare il contenuto del workspace del modello, nell'Editor di Simulink, nella scheda Modeling (Modellazione), sotto Design, selezionare Model Explorer. In Model Explorer, cercare tra i contenuti del modello sldemo_suspn e selezionare "Model Workspace" (Workspace del modello). Il caricamento delle condizioni iniziali nel workspace del modello impedisce qualsiasi modifica accidentale dei parametri e mantiene ordinato il workspace di MATLAB.
Il modello registra i dati rilevanti nel workspace di MATLAB in una struttura di dati denominata sldemo_suspn_output. Digitare il nome della struttura per vedere quali dati contiene.

I risultati della simulazione sono riportati sopra. I risultati sono tracciati dal file sldemo_suspgraph.m. Le condizioni iniziali predefinite sono riportate nella Tabella 1.
Tabella 1: Condizioni iniziali predefinite
Lf = 0.9; % front hub displacement from body gravity center (m) Lr = 1.2; % rear hub displacement from body gravity center (m) Mb = 1200; % body mass (kg) Iyy = 2100; % body moment of inertia about y-axis (kg m^2) kf = 28000; % front suspension stiffness (N/m) kr = 21000; % rear suspension stiffness (N/m) cf = 2500; % front suspension damping (N sec/m) cr = 2000; % rear suspension damping (N sec/m)
Questo modello consente di simulare gli effetti delle variazioni dello smorzamento e della rigidità delle sospensioni, valutando così il compromesso tra comfort e prestazioni. In generale, le auto da corsa hanno molle molto rigide con un elevato fattore di smorzamento, mentre le autovetture ordinarie hanno molle più morbide e una risposta più oscillatoria.