Modellazione dell'attrito stick-slip e degli arresti bruschi nel sistema massa-molla-smorzatore
Questo esempio mostra un modo in cui è possibile incorporare gli arresti bruschi e le variazioni di attrito del movimento stick-slip in un modello massa-molla-smorzatore.
In un modello massa-molla-smorzatore, una massa si attacca all'estremità di una molla. La molla ha una lunghezza nominale che può allungarsi e comprimersi in risposta a forze esterne. La costante della molla determina la forza che la molla esercita sulla massa in base a quanto la molla viene allungata o compressa.
Quando il sistema limita la posizione della massa, questi limiti rappresentano gli arresti bruschi nelle oscillazioni della massa sulla molla. Quando la massa raggiunge il limite superiore o inferiore della sua posizione, la massa si ferma bruscamente; questo significa che la velocità si è azzerata.
Il movimento stick-slip può verificarsi quando due superfici si muovono l'una contro l'altra in modo dinamico. Ad esempio, nel sistema massa-molla-smorzatore, la massa si muove su una superficie mentre oscilla sulla molla. L'attrito tra la massa e la superficie cambia quando la velocità della massa raggiunge lo 0. La massa si blocca quando l'attrito statico è maggiore della forza della molla e scivola indietro nell'oscillazione quando la forza della molla supera l'attrito statico.
Apertura e analisi del modello
Aprire il modello sldemo_hardstop. Il modello contiene un sottosistema denominato Friction Model che calcola la forza dovuta all'attrito e due blocchi Integrator che calcolano la velocità e la posizione della massa.
mdl = "sldemo_hardstop";
open_system(mdl)
Il blocco Integrator che calcola la velocità è configurato per:
Fornire il valore dello stato come output.
Ripristinare il valore di output a 0 m/s in base a un segnale esterno.
Avere uno stato iniziale di 100 m/s.
Il blocco Integrator che calcola la posizione modella gli arresti bruschi del sistema limitando l'intervallo dei valori di output in base alle posizioni minime e massime possibili. Il blocco presenta una porta di output supplementare con un segnale che indica quando il valore di output raggiunge uno dei limiti, ossia quando la massa ha raggiunto la posizione minima o massima. Per modellare l'arresto brusco, il segnale di limite ripristina il blocco Integrator che calcola la velocità a 0 m/s.
Visualizzazione e analisi del modello di attrito
Per visualizzare il contenuto del sottosistema denominato Friction Model, fare doppio clic sul blocco del sottosistema o utilizzare la funzione open_system.
open_system(mdl + "/Friction Model")
Il sottosistema calcola due output: la forza totale che agisce sulla massa e un indicatore che segnala quando la massa si blocca e ha una velocità pari a zero.
Per determinare quando la massa ha una velocità pari a zero, il sottosistema utilizza lo stato del blocco Integrator che calcola la velocità della massa. Lo stato del blocco Integrator è la velocità del precedente momento temporale principale nella simulazione. Nel momento temporale principale successivo dopo che la velocità raggiunge lo zero, il modello di attrito:
Imposta l'indicatore
Stuckche ripristina il blocco Integrator che calcola la velocitàCommuta il calcolo dell'attrito in modo da utilizzare il coefficiente di attrito statico anziché il coefficiente di attrito cinetico
Per calcolare la forza totale che agisce sulla massa, il sottosistema aggiunge la forza della molla a quella dell'attrito cinetico o statico.
Se si utilizza la porta di stato del blocco Integrator che calcola la velocità per determinare quando la massa è bloccata, si evita di creare un loop algebrico nel modello.
Simulazione del modello e analisi dei risultati
Simulare il modello. Sulla barra degli strumenti Simulink®, nella scheda Simulation (Simulazione), fare clic su Run (Esegui). In alternativa, eseguire la simulazione utilizzando la funzione sim.
out = sim(mdl);
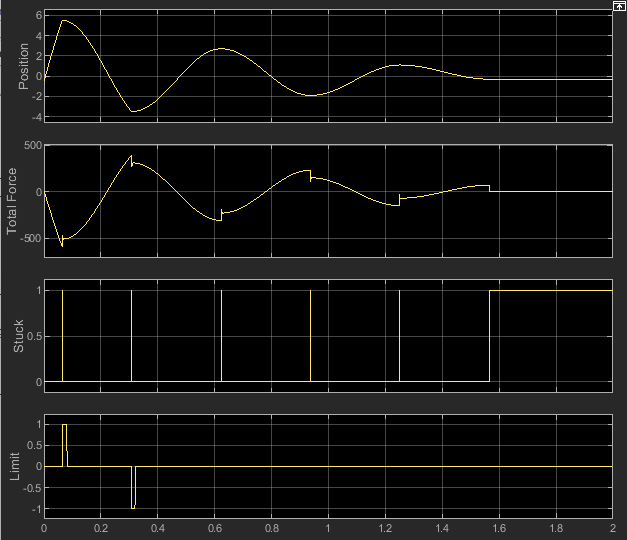
Per visualizzare i risultati della simulazione, fare doppio clic sul blocco Floating Scope.
La diminuzione dei minimi e dei massimi del segnale di posizione nel grafico superiore mostra il modo in cui l'attrito consuma energia nel sistema.
Le discontinuità nel valore della forza totale mostrate nel grafico secondario mostrano l'effetto dell'utilizzo del coefficiente di attrito statico quando la massa si blocca e la sua velocità si azzera.
Il terzo grafico secondario mostra che i momenti temporali con discontinuità corrispondono ai momenti temporali in cui è stato impostato l'indicatore
Stuck. L'indicatoreStuckrimane impostato dopo un tempo di simulazione vicino a 1,6 secondi perché la massa è arrivata a riposo.L'ultimo grafico secondario mostra che un arresto brusco si è verificato solo due volte, all'inizio della simulazione.