connectVia
Class: simscape.multibody.Multibody
Namespace: simscape.multibody
Description
connectVia(
links two connectors, mb,viaComponent,connectorB,connectorF)connectorB and connectorF,
of the component objects in a simscape.multibody.Multibody object, mb, via the intermediate
object, viaComponent.
The connectVia method makes connections only between component objects
at the top level of a Multibody object. The viaComponent
object must have exactly two frame connectors, B and F, that refer to the base and follower
connectors. The base connector links to the connectorB connector, and
the follower connector links to the connectorF connector. The image
shows an example.
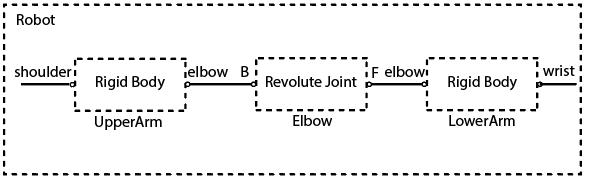
Here, the connectVia method uses a simscape.multibody.RevoluteJoint object, Elbow, to connect the
elbow connectors on the UpperArm and
LowerArm objects.
connectVia(Robot, "Elbow", "UpperArm/elbow", "LowerArm/elbow");
Input Arguments
Version History
Introduced in R2022a